|
|||||||||||
|
Úvodní stránka
Obsah
Titulní list
Editorial
AERO Friedrichshafen
Polára
Monitorovací letoun
Ústav letadlové techniky
UAV
Otázky a odpovědi
Slovník pojmů
Rozmařilé počasí
Knihy
AL na DVD
|
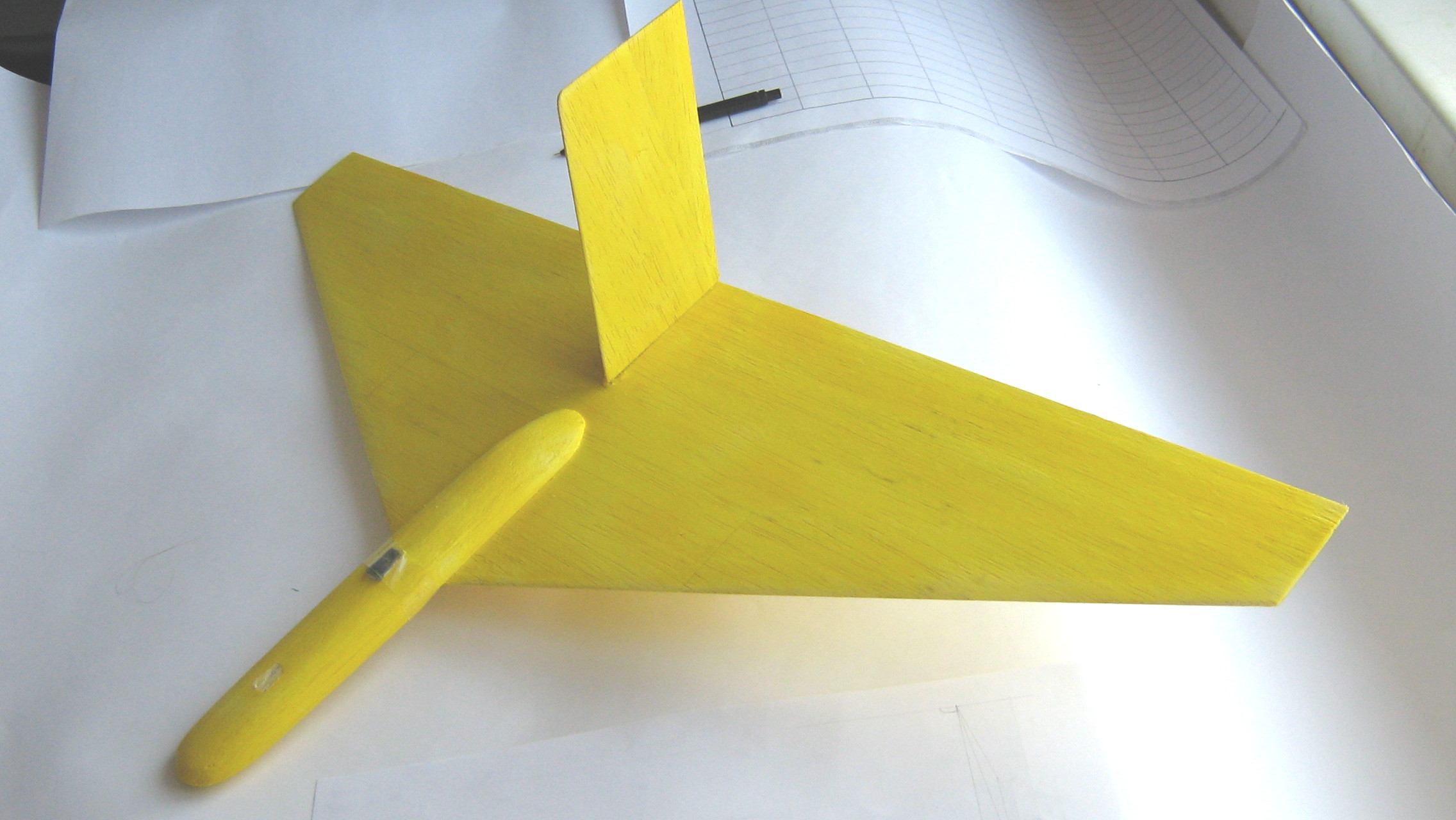
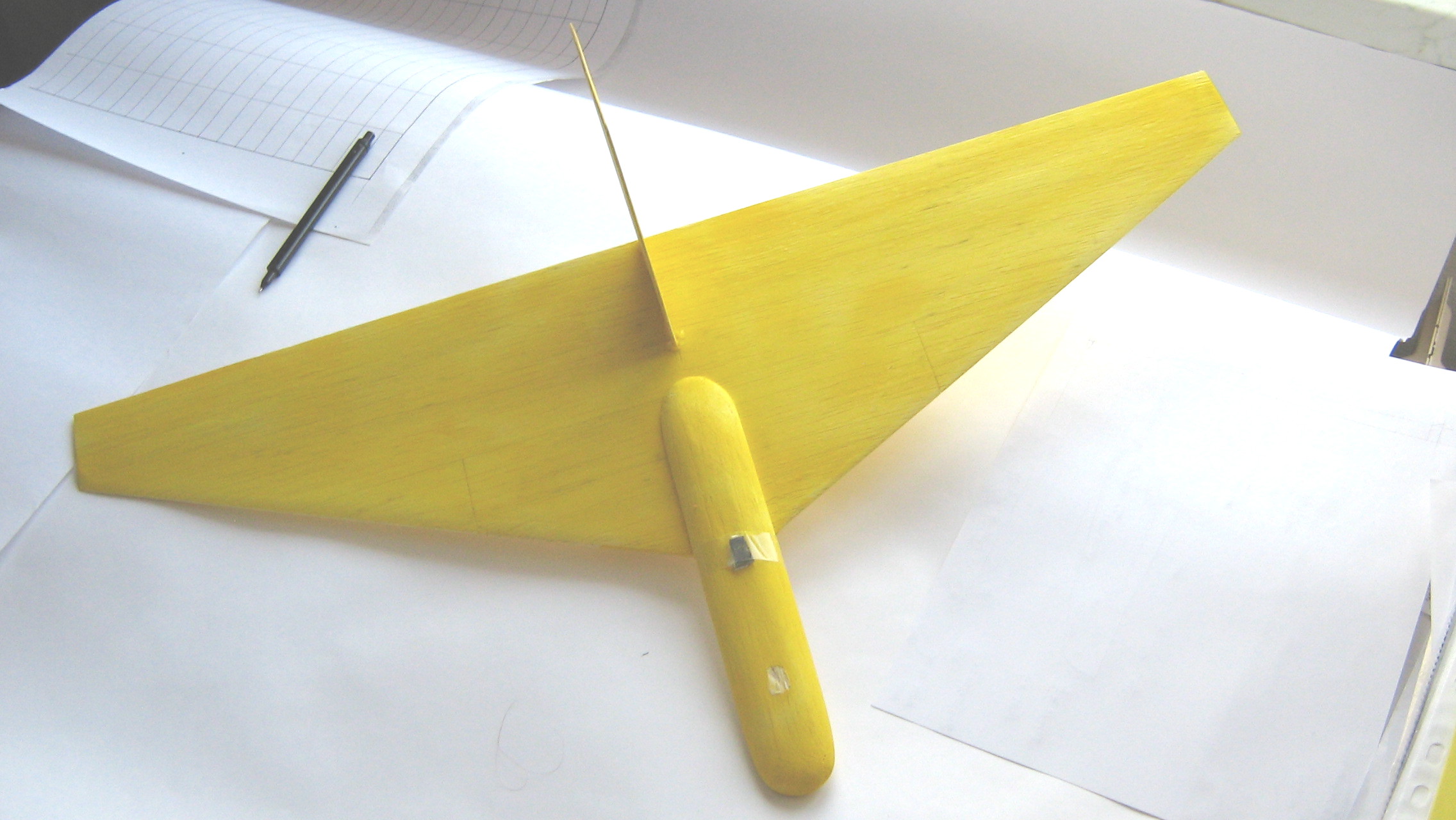
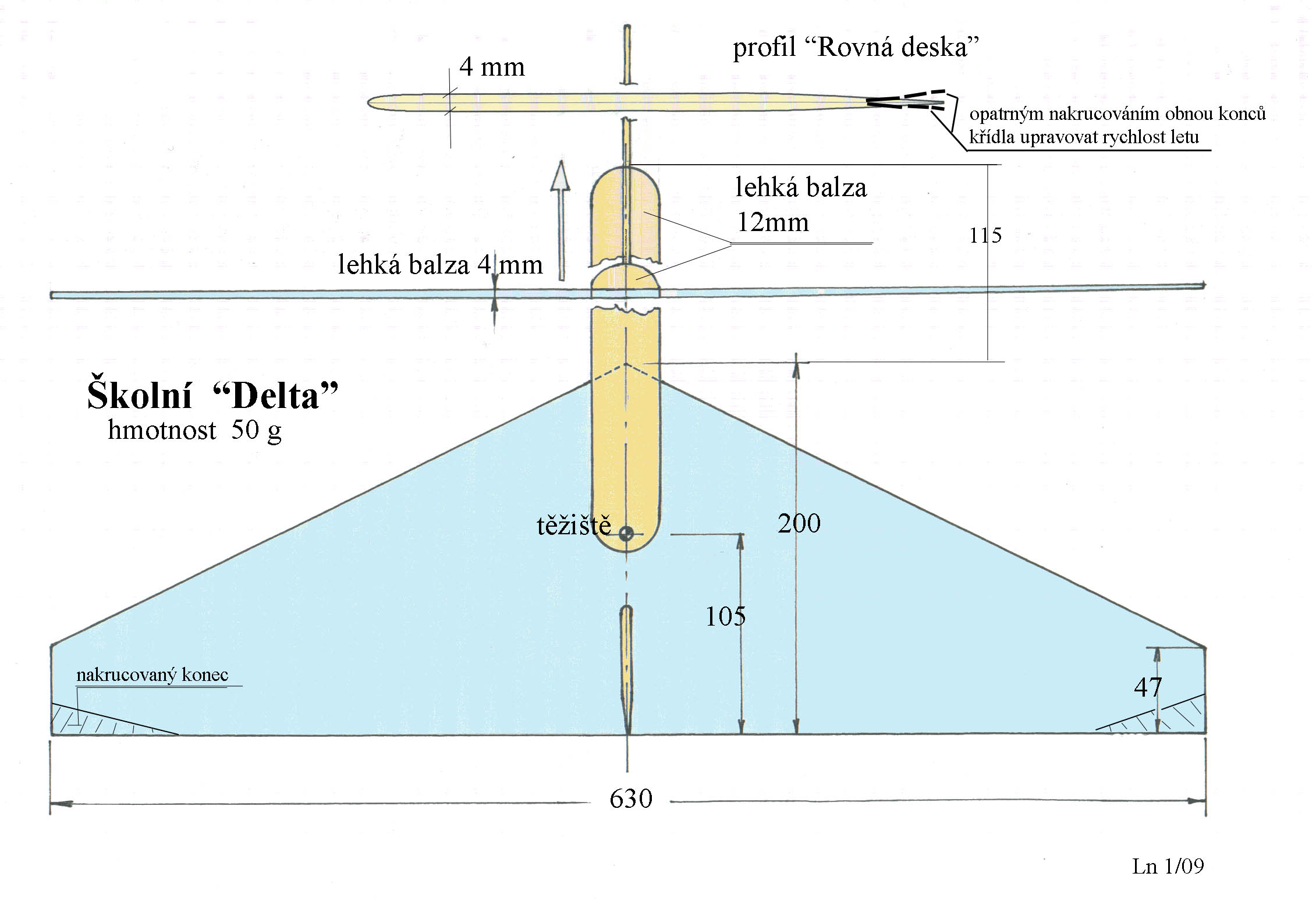
Unmanned Aerial Vehicles (UAV) Co to je? Jsou to všechny létající stroje bez lidské posádky, které se pohybují v atmosféře Země a mají všelijaké úkoly. Viz také heslo v „Souboru vybraných pojmů“. Takže mezi ně lze zařadit, s jistou dávkou fantazie, i malé modely letadel. Některé jsou řízeny na dálku, jiné(autonomní) se zase pohybují zcela samostatně jsouce vybaveny automatickým pilotem a potřebným programem. Již jsme se o nich zmínili nejméně dvakrát. Naposledy v Akademii 3/09. Jejich rozměry se nacházejí v rozmezí od několika decimetrů rozpětí (nebo délky) do více než deseti metrů. Hmotnosti pak od několika stovek gramů až po několik tun. Rychlosti letu mohou být srovnatelné jak třeba s jízdou na kole nebo se subsonickými(nepatrně podzvukovými) letouny, tak i s letadly dosahujícími Machova čísla nad 1,5. Jejich hlavním posláním je obvykle nepozorovaně a nehlučně pátrat ve vybraném prostoru, získávat zde potřebné informace a předávat je řídícímu středisku. Mezi jejich výkonové parametry náleží například vytrvalost letu ( i několik měsíců), rychlost pohybu, snadné manévrování, dostup a stejně tak i lety kopírující zemský povrch ve výšce několika metrů nad terénem(mořskou hladinou) atd. Bohužel jsou již také útočné typy, které vybaveny účinnými zbraněmi jsou využívány ve válečných konfliktech. Mnohé z nich byste si snadno spletli s modely letadel. Od nich také bylo převzato nemálo aerodynamických a konstrukčních poznatků včetně používaných materiálů. Jejich masivnější rozvoj začal před více desítkami let, když se například zjistilo, že by bylo možno upravené modely letadel využít pro jiné než sportovní a zábavné účely. Jedním z prvních podnětů k jejich zrodu byla však možná potřeba zajistit vzdušné cíle pro výcvik bojových posádek letadel a protivzdušné obrany. Což nemusí být věrohodné. Takže například armády mnoha zemí je mají tzv. „pod palcem“ a vynakládají na jejich vývoj, výrobu i provoz nemalé částky. Skoro srovnatelná situace začíná být i u nás. Vývoj a výroba bezpilotních prostředků, ať již pro jakýkoliv účel, byla umožněna také prudkým rozvojem elektroniky, malých a středních účinných a spolehlivých pohonných jednotek, zdroji energií atd. Bezpilotní prostředky však mohou ztížit podmínky pro zajištění nezbytné bezpečnosti letového provozu civilního i vojenského, jejichž intenzita využívání atmosféry Země neustále narůstá. Tak se o ně začaly, celkem logicky, zajímat i nadnárodní organizace mající s tím co do činění, například EASA koncipovala svoje návrhy již před několika lety. O tom jsme ale také již psali a bylo to v souvislosti s regulací leteckého provozu nad územím ČR. Proč jsme začali o bezpilotních systémech, když předvádíme delta křídlo? Protože jsme psali také například o tom, jak mohou docela dobře „fungovat“ i létající stroje s nepohyblivými nosnými plochami bez ocasních ploch. Jejich tvary v mnoha případech, zdaleka ne však vždy, jsou využívány i v případech UAV. V posledních několika letech se objevilo mnoho „bezocasých“ řešení i u modelů letadel s pohonnými jednotkami. Převážně menších rozměrů a hmotností do 1kg. Ale ne všichni zájemci jsou schopni svoje vlastní zkušenosti s takovýmito modely, bez cizí pomoci, získat. My, abychom umožnili případným zájemcům a nadšencům seznámit se blíže s některými výkonovými a letovými vlastnostmi takových strojů, přinášíme námět na sestavení „samokřídla“ typu delta, který jsme funkčně v bezmotorovém provedení odzkoušeli. Je na následujících obrázcích zachyceno.
Jedná se o model s velmi malou štíhlostí nosné plochy(cca 5), což má za následek její poměrně značný indukovaný odpor( s tím jsme počítali), vybavenou symetrickým tenkým profilem a malou SOP pro snadnější udržení letu v přímém směru. Zatížení nosné plochy je velmi malé, asi 6,1N/m2. Tenký profil nosné plochy, s náznakem jakéhosi trupu, propůjčuje modelu poměrně malý profilový a škodlivý odpor. Neumožňuje však ale také vyvinout větší vztlak, takže aerodynamická jemnost je srovnatelná přibližně s nejlepšími „Rogaly“. Celkově je nepochybně součinitel odporu modelu, vlivem indukovaných jevů z okrajů křídla při větších úhlech náběhu, dost velký. Malé zatížení nosné plochy poskytuje však možnost, při správném vyvážení, dosahovat velmi malých rychlostí letu. Příznivou příčinou toho je však i známá vlastnost křídel malých štíhlostí posouvat odtrhávání proudu do větších hodnot úhlů náběhu, což má za následek mírné zvětšení maximálně dosažitelného vztlaku. A proto jsme zvolili delta-křídlo. K tomu je však, mimo jiné, třeba napomoci, při tak tenkém profilu mírně upraveného tvaru „rovné desky“, vhodnou velikostí poloměru náběžné hrany. Velmi ostrá náběžná hrana zaručuje přijatelné obtékání nosné plochy pouze ve velmi malém rozmezí úhlů náběhu. A to je v našem případě, když nechceme použít VOP, nevýhodné. Nosná plocha, jejíž obě poloviny mají tvar lichoběžníka je bez geometrického zkroucení. Pravděpodobně by to ale letovým vlastnostem prospělo. Nám se však povedlo, při dodržení polohy těžiště (viz údaj na obrázku) a následné úpravě (zvětšení) poloměru náběžné hrany zajistit přijatelnou velikost podélné stability i u neřízeného modelu.
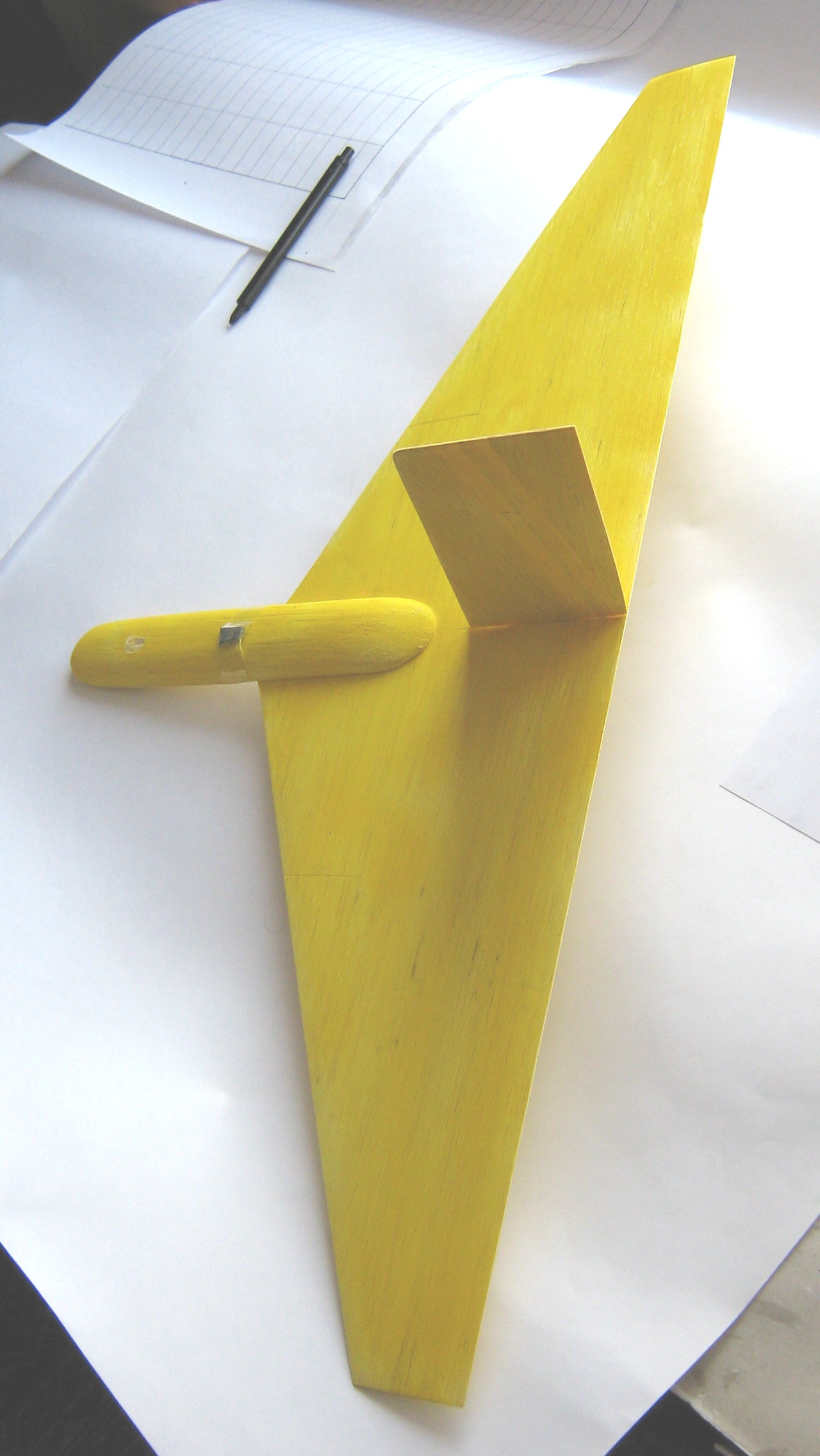
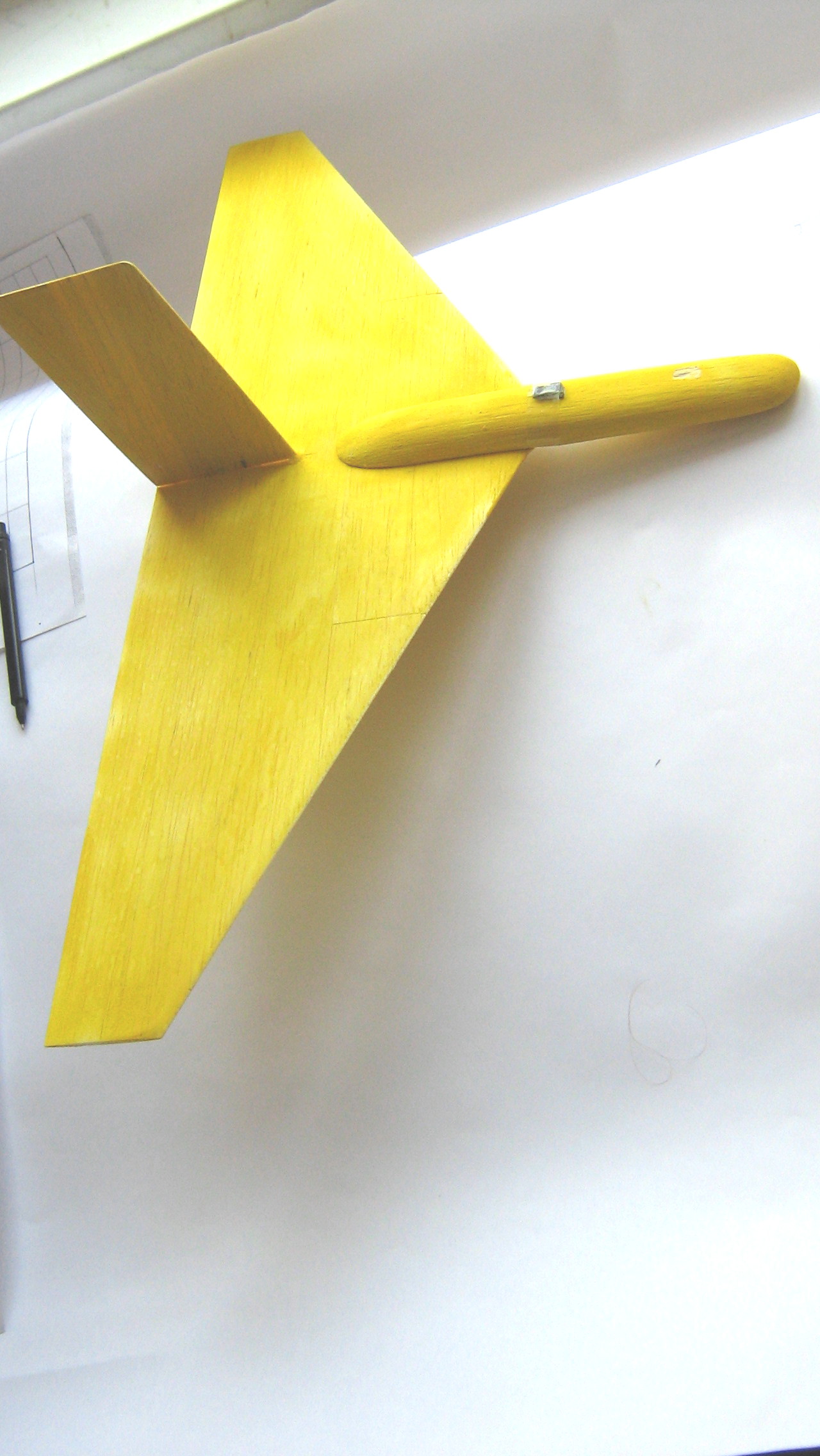
Ke stavbě modelu byla použitá lehká balza ( do 120 kg/m3) tloušťky 4 mm na celé nosné ploše, ke koncům pouze mírně zeslabená. Nosná plocha je tedy aerodynamicky kroucená. Profily na obou koncích mají asi 2x větší poměrnou tloušťku, která však nepřevyšuje cca 6%, než profily ve středu. Tloušťky profilů uprostřed plochy mají hodnotu kolem 2%. Na prve uvedeném obrázku je také naznačeno o jaký tvar „rovné desky“ se asi rovná. Přední část je zaoblena do cca 20% hloubky a zadní plynule zeslabena od cca 75% hloubky na méně než 1mm na odtokové hraně. Polohu těžiště je třeba u neřízeného, tj. volně létajícího, dodržet tak, aby model klouzal po vypuštění z ruky, ve výšce cca 1,5m, do vzdálenosti cca 15m ustáleným letem(za bezvětří či velmi slabého větru). K zajištění jiných letových režimů, například zvýšením zatížení, je třeba znovu „naladit“ polohu těžiště a případně použít možnost nakroucení okrajových částí křídla(tak jako to dělají ptáci a po nich mnozí pionýři letectví ještě na počátku 20. století). Viz předchozí obrázek. Velmi mírným nakroucením vzhůru, obou konců stejně, se model výrazně zpomalí. Nesmí se však zbrzdit tak, aby se let změnil na padání na jednu nebo druhou stranu. Pak je nutno buď přidat zátěž v přídi trupu nebo nakroucení zmenšit. Nakroucením konců dolů se let značně zrychlí. Neměla by se však výrazně zkracovat délka doletu. Tuto úpravu doporučujeme použít v případě větrného počasí a na mírném svahu. V obou uvedených případech je nakroucení obou konců o jeden-dva milimetry dost hrubým zásahem do podélného seřízení tohoto malého modelu. S tím je nutno počítat. Pro snadnější vypouštění modelu rukou je výhodné přilepit na dolní stranu v ose modelu, ale mírně za těžištěm, svislou balzovou plošku takové velikosti, aby jej zde bylo možno uchopit a vypustit pod správným úhlem vhodnou rychlostí. Až získáte, pokud budete chtít, nezbytný rozsah zkušeností, tak by nebylo od věci opatřit tento model miniaturní pohonnou jednotkou a následně ještě aparaturou k dálkovému ovládání. Celková hmotnost tohoto modelu by mohla vzrůst i na 250g. Pevnost a tuhost křídla by měla zaručit spolehlivý provoz. Protože by však rychlost letu vzrostla více než dvakrát, bylo by nutno počítat s občasnými poškozeními při nepovedených přistáních. Takže tohle je náš skromný a z hlediska aerodynamiky poučný příspěvek k miniaturizaci UAV prostřednictvím leteckého modelářství, který by neměl narušit bezpečnost skutečného letového provozu, jak je leteckým modelářům nezřídka připisováno.
Jaroslav Lněnička
29.1.2009
|
||||||||||
| e-magazín Akademie letectví :: © Jan Janovec, © Jaroslav Lněnička :: akademie@airspace.cz | |||||||||||