|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Úvodní stránka
Obsah
Titulní list
Editorial
Ocasní plochy
Tíha a odpor
Otázky a odpovědi
Slovník pojmů
Knihy
AL na DVD
|
Ocasní plochy letadel
Každý létající stroj má mít prostředky k tomu, aby mohl ovlivňovat svůj pohyb v ovzduší. U letounů s pevnými křídly, i u jejich modelových kopií či napodobenin, jsou to jejich části umístěné na příklad na trupu, které to změnami zakřivení svých základních tvarů nebo poloh vůči letu umožňují.
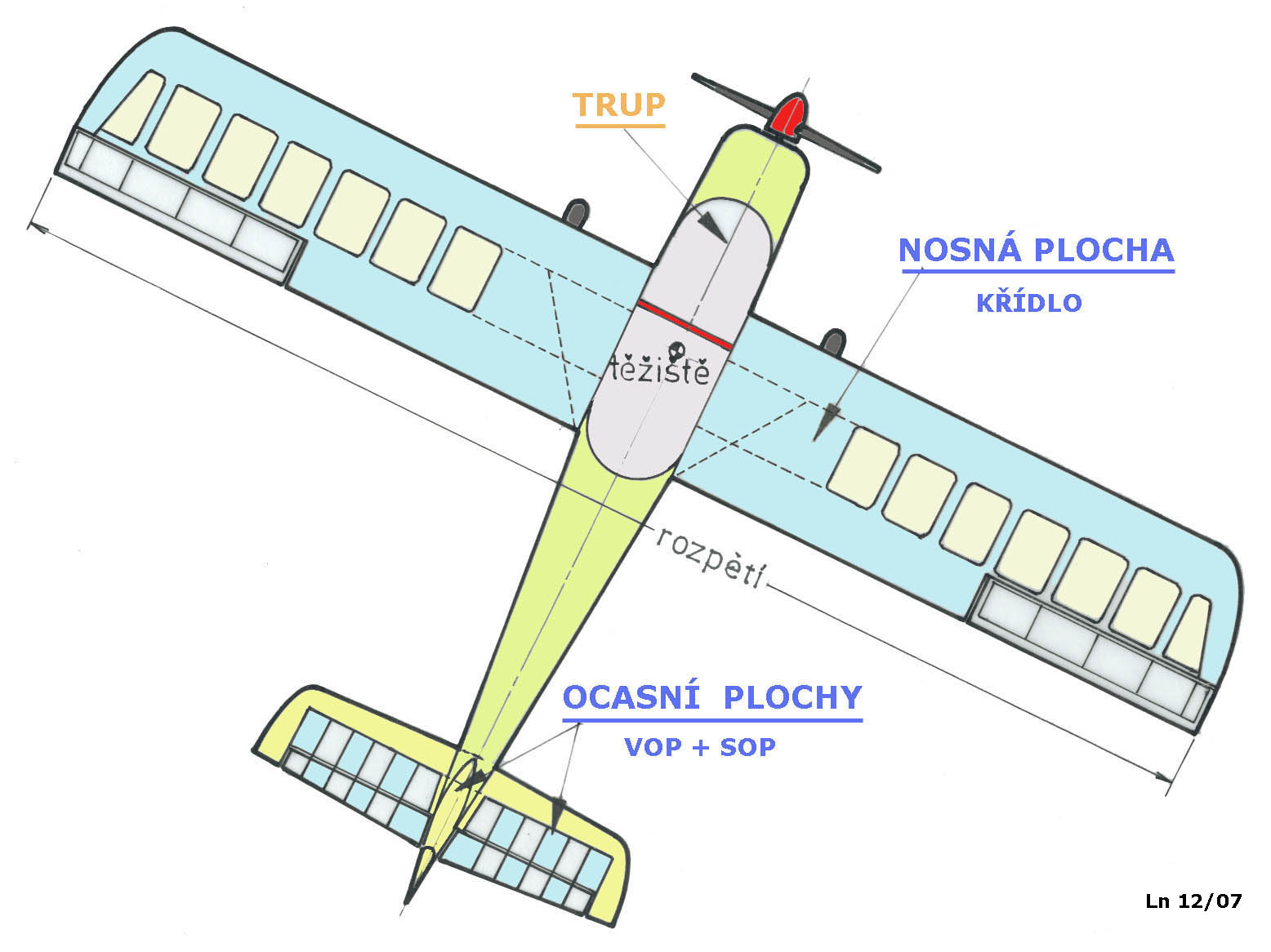
Podobně jako u křídla každého létajícího stroje, které má zásadní vliv na jeho výkony a letové vlastnosti, nelze přehlédnout ani významný vliv ocasních ploch na ně. Tyto plochy jsou umístěny obvykle na trupech letounů a to hlavně v jejich zadních částech. Na obr.č.1 je anonymní příklad půdorysu motorového letounu v němž je poukázáno na jeho tři důležité části – trup, nosná plocha(křídlo) a ocasní plochy. Je zde také uvedena přibližná poloha těžiště stroje. To je celkem běžná informace nevyjadřující nic převratného. Zaznamenejte snad jen to, že barevně odlišená menší část VOP(výškové kormidlo) je pohyblivá.
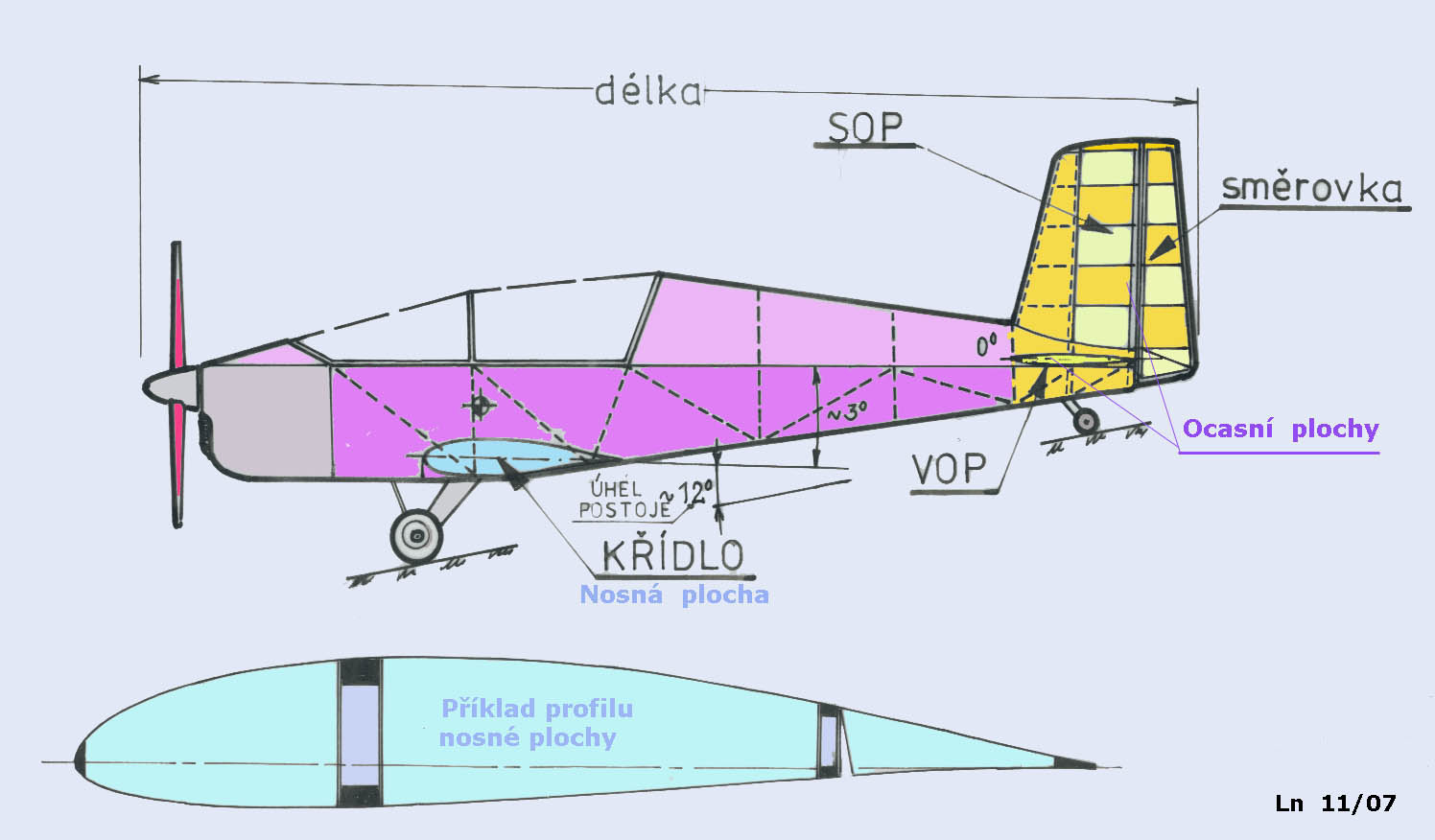
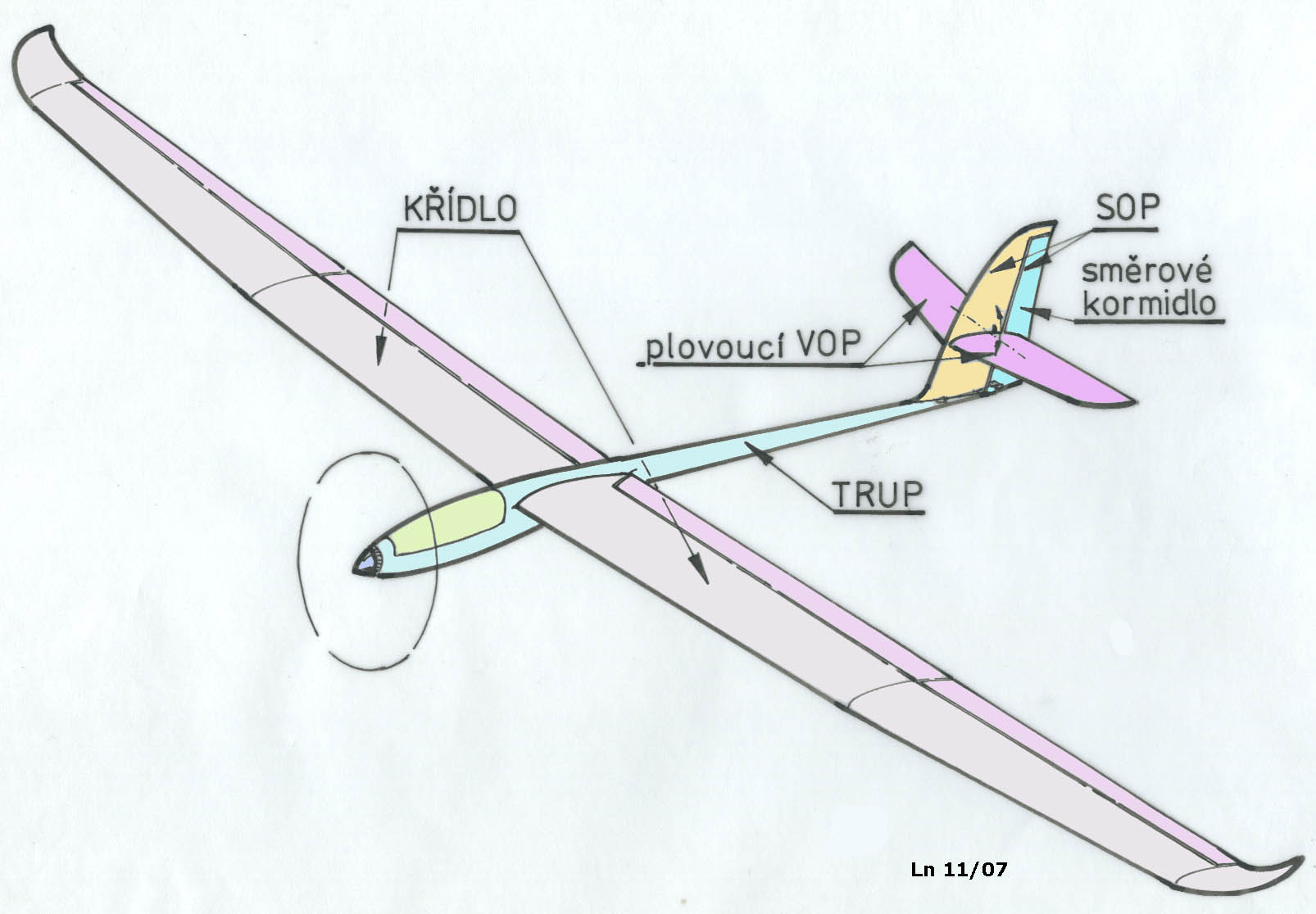
Na obr.č.2 je bokorys návrhu tohoto letounu. Povšimněte si označení SOP, směrovka a VOP. Směrovkou(směrovým kormidlem) je zvána v tomto případě pohyblivá menší část SOP. Pro méně zkušené adepty letectví, kteří by chtěli uplatnit svoje předpoklady v konstruování je zde také dost důležitý údaj o úhlu postoje letounu na zemi. Pokud by byl výrazně menší, než uvedených 12o , nastanou potíže při startování i přistávání. Co počítáme mezi ocasní plochy? Je to vodorovná ocasní plocha ( VOP ) nebo jinak také zvaná stabilizátor a svislá ocasní plocha( SOP). Na obr.č.3 je ještě uvedeno řešení ocasních ploch převážně používané u výkonných bezmotorových skutečných letadel i jejich modelů. Zde je to řešení sestávající z SOP se směrovým kormidlem a pevnou přední (kýlovou)částí a tzv. plovoucím stabilizátorem(VOP). Ten není v tomto případě dělený na pevnou a pohyblivou část. Je prostě vcelku a mění svůj úhel náběhu otáčením podle vodorovné osy a tím pomáhá dosáhnout změn výšky letu a také zatáčení. Protože obě ocasní plochy VOP i SOP se mohou při náklonech letounu částečně zastupovat.
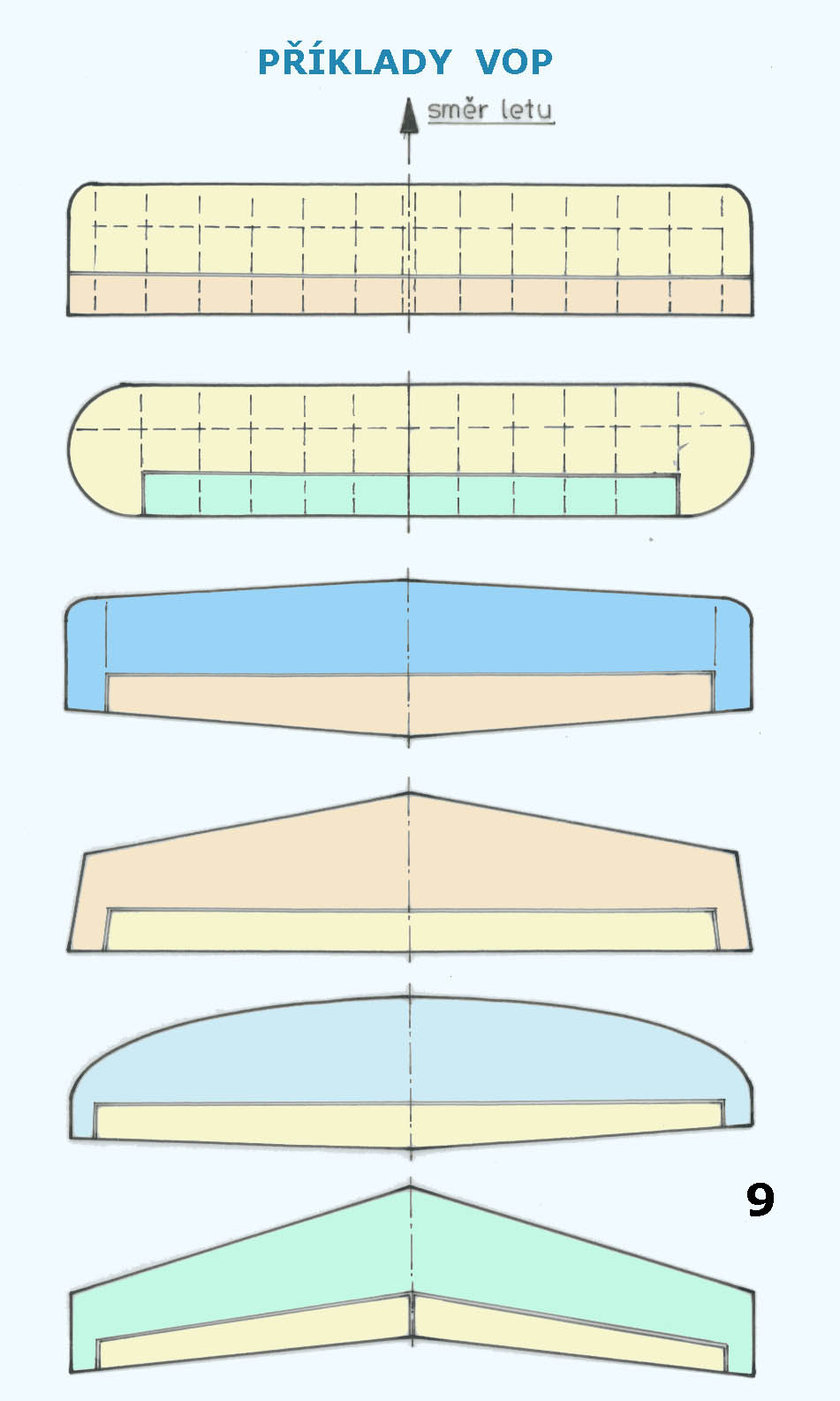
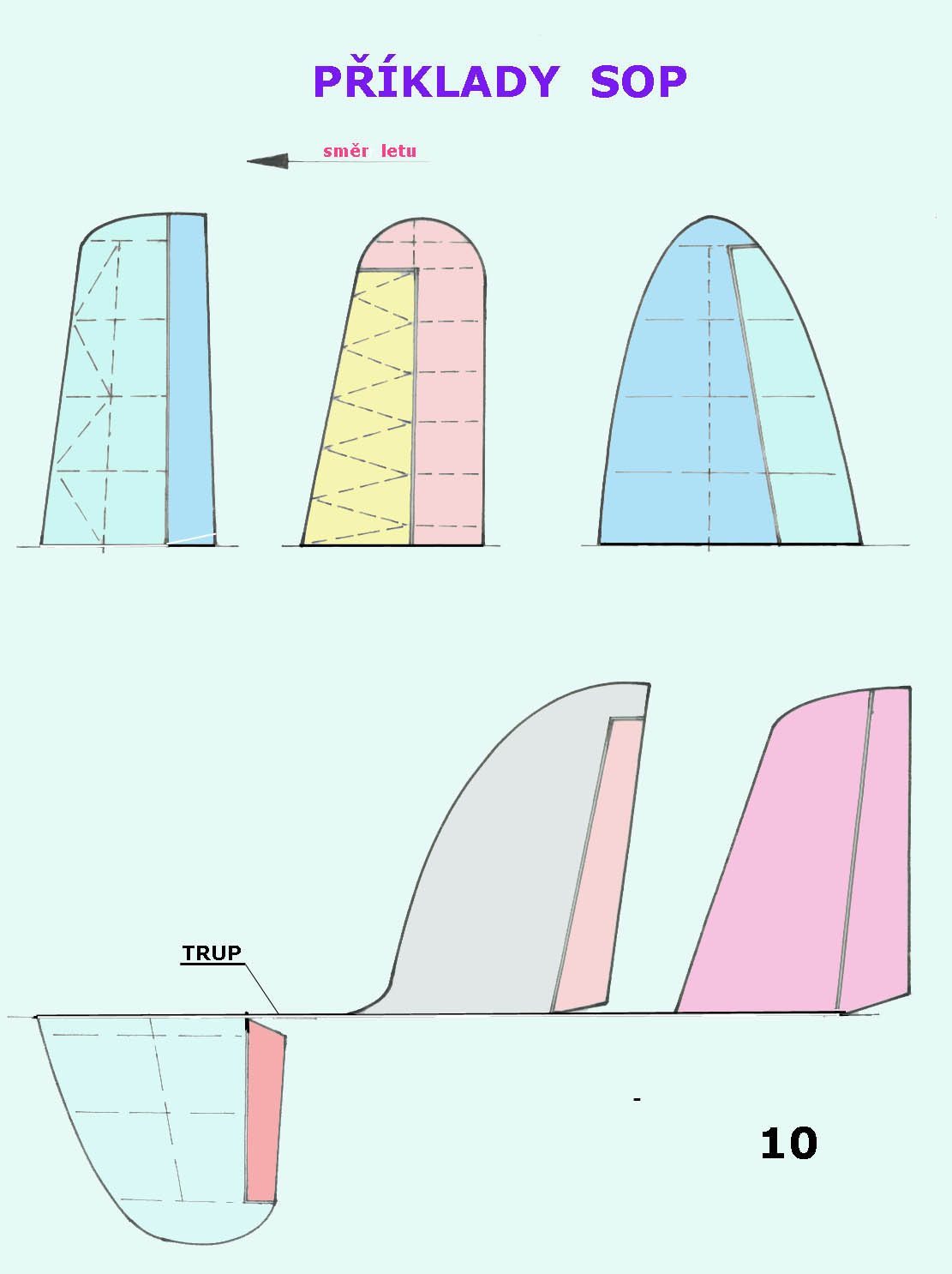
Ocasní plochy mohou mít svoji jednu část pevnou a druhou, obvykle menší, pohyblivou, která je zvaná kormidlem. U SOP nazýváme pohyblivou část směrovkou a u VOP zase výškovkou, viz předchozí obrázky, které jsou ovládány vhodným systémem řízení. Výchylka kormidla ocasní plochy z neutrální polohy změní jeho původní tvar a dochází tak k vytvoření aerodynamické síly, která u SOP způsobí zatáčení i klonění, pokud je vychýlena po delší dobu a u VOP změnu výšky letu. Výchylky kormidel se nacházejí v rozmezí ± 30o. Větší hodnoty výchylek sice vedou k vytvoření větších aerodynamických účinků, ale odpor narůstá značně. Vzájemné poměry pevných a pohyblivých částí ocasních ploch jsou naznačeny v obr. 9 a 10. Takto je ovládána stále ještě značná část modelů letadel, tak jako tomu bylo také po nějakou dobu i u prvních skutečných letounů na počátku 20. století. Jestliže ocasní plochy nemají pohyblivou část a mění svoje postavení vůči směru letu( úhly náběhu) jako celky, pak jim říkáme plovoucí ocasní plochy. Obvykle se to týká jen VOP. I když již v počátcích letectví byly u několika letounů použity jejich staviteli-pionýry letectví, obě ocasní plochy plovoucí( viz například aeroplán Farmanův v kapitole „Ohlédnutí do minulosti…“ v AL č.2). Změna úhlu náběhu ocasní plochy s sebou přináší změnu aerodynamické síly, která způsobí buď zatáčení(i případně klonění) nebo změnu výšky letu. Výchylky plovoucích ocasních ploch jsou poměrně malé a nepřesahují obvykle hodnotu ± 12o, protože používají převážně symetrické profily jejichž odpory se zvětšujícími se úhly náběhu prudce narůstají.
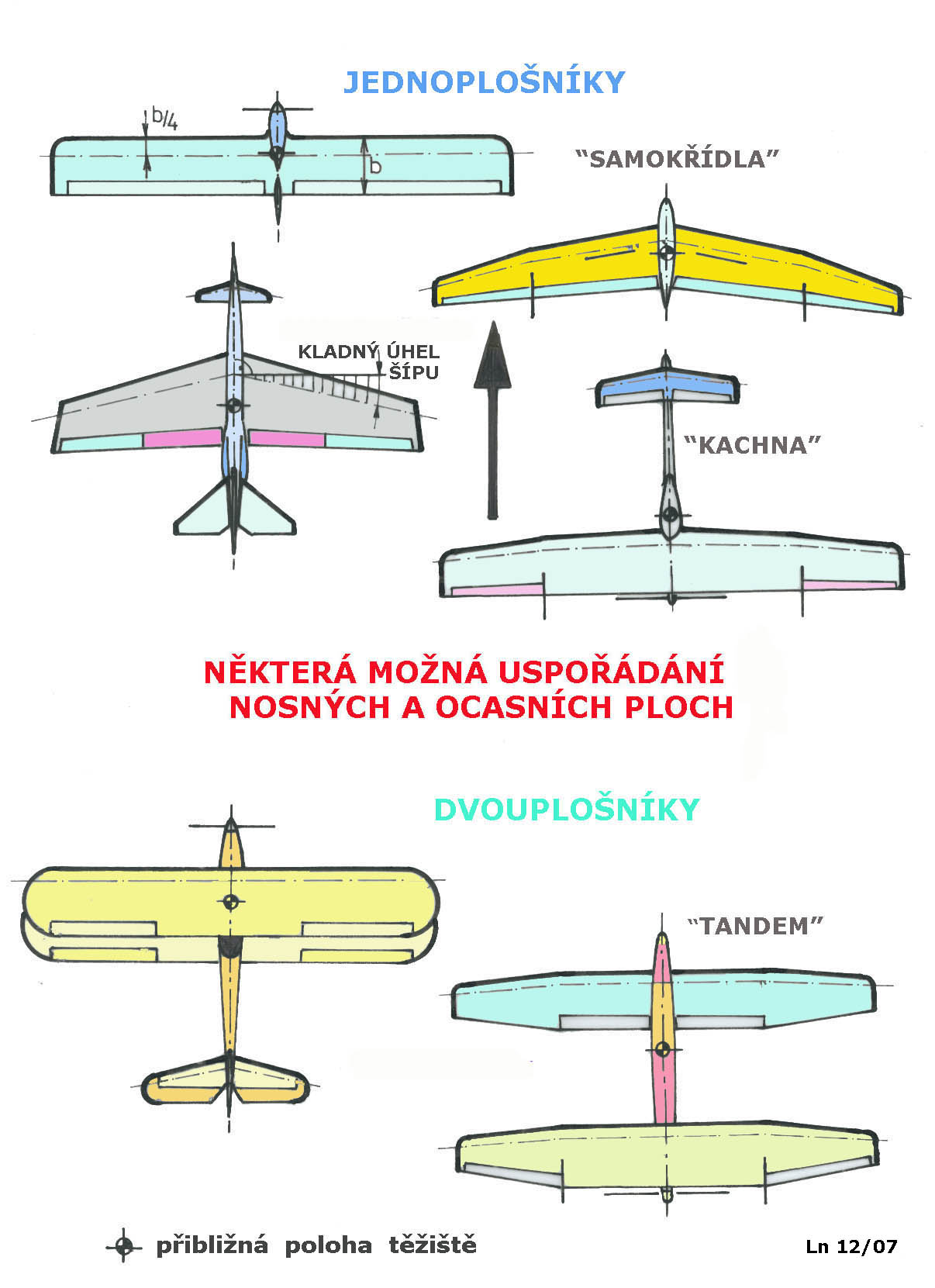
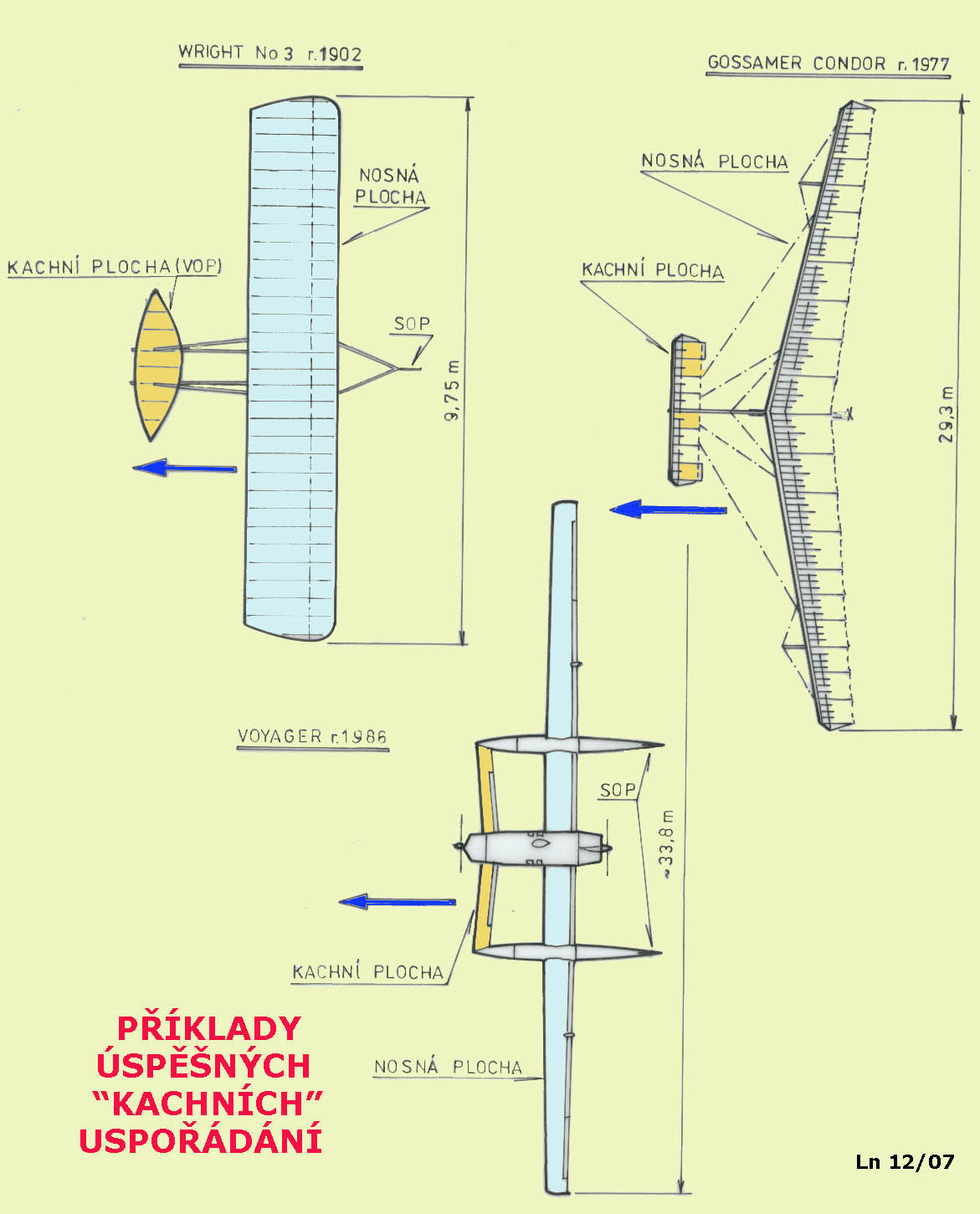
Ocasní plochy mohou být podle typu letounu umístěny za křídlem nebo před ním, viz obr.č.4, kde jsou některá možná vzájemná uspořádání nosných a ocasních ploch uvedena. Jsou zde také vyznačeny přibližné polohy těžišť uvedených typů letounů. Horní dva případy představují bezocasá letadla u nichž je pro změnu výšky letu vyčleněna část nosné plochy, v tomto případě za těžištěm. Další dva případy jsou příklady letounů u nichž je VOP umístěná za křídlem doplněna pomocnou VOP před ním. Nebo je jediná VOP umístěná pouze před křídlem. Je to tzv. „kachní“ uspořádání ploch. SOP jsou v obou případech za těžišti letounů. Levý dolní příklad je typickým příkladem umístění ocasních ploch ve vhodné vzdálenosti za těžištěm. Tato vzdálenost je úzce spojena s velikostí VOP i SOP. Vzdálenost a velikost VOP od těžiště, ať je umístěna před nebo za křídlem, ovlivňuje stabilitu létajících strojů zásadně( viz statě o A.C v předchozích dvou číslech AL). Pravý dolní příklad je tzv. tandémové uspořádání nosných ploch, což znamená, že obě plochy přispívají značným dílem k vytváření nosné síly-vztlaku. Výškové kormidlo je zde částí přední nosné plochy. Obvyklé umístění obou ocasních ploch je u převážné většiny letadel za křídlem. Jestliže je VOP umístěna před křídlem, pak je zvaná kachní plochou, viz obr. č.5, kde jsou připomenuty tři z velmi slavných „kachen“, jež zapůsobily na vývoj letectví od jeho počátků až do devadesátých let 20.století.
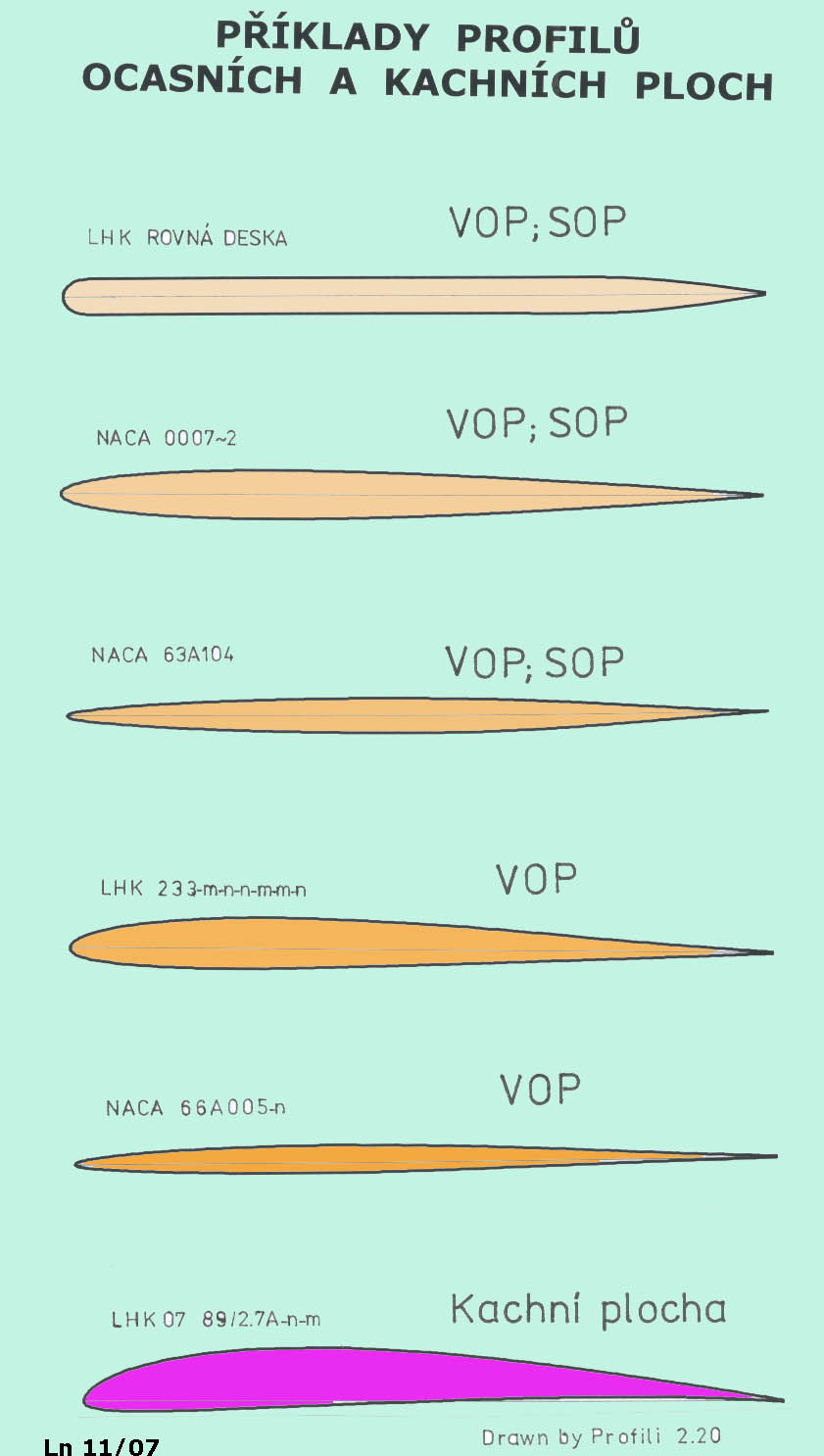
První z nich je bezprostřední předchůdce úspěšného motorového „Flyera“ bratrů Wrightových. Zpočátku pevnou VOP postupně vybavovali pohyblivou plochou, aby zlepšili řízení v podélném směru. Američan Paul Mc Cready, využil svých nejen leteckomodelářských zkušeností a dosáhl s „Gossamer Condorem“ letu ve vzdálenosti jedné míle na“lidský pohon“. Pomohly mu k tomu nové materiály a také subtilní trenovaný cyklista, který dokázal vyvinout po dobu asi 7 minut výkon kolem 0,33KW. Kachní plocha byla plovoucí. Kachní „Voyager“ amerických bratrů Rutanových dokázal v roce 1986 obletět Zemi během 9 dní bez mezipřistání. Dvoučlenná posádka se střídala v řízení. „Voyager“ se dvěma vrtulovými pohonnými jednotkami(viz anketa v AL č.0) byl v podstatě nádherně tvarovanou palivovou nádrží. Protože palivo bylo všude po celém letounu. Přesto měli po přistání mnohem menší zbytek paliva v nádržích, než měl Ch. Lindbergh při solo přeletu Atlantiku v roce 1927. To byly tři příklady ze slavných létajících strojů, které měly VOP před nosnou plochou na přídích trupů. Jaké mají ocasní plochy profily, může znít otázka zaníceného stoupence letectví? Profily ocasních ploch jsou v podstatě obdobou profilů nosných ploch. To na příklad znamená, že jsou bez prohnutí(symetrické)-SOP nebo také s nějakým vhodným prohnutím- VOP. Jejich tloušťky jsou vesměs menší než je běžný průměr u nosných ploch. Tyto hodnoty se mohou pohybovat v rozmezí 5 až 10%.
Na obr.č. 6 jsou nahoře tři symetrické profily použitelné pro VOP i SOP. Čtvrtý a pátý profil pod nimi může být použit pouze pro VOP, protože jeho malé prohnutí vykazuje, při obdobných aerodynamických charakteristikách, jaké mají profily symetrické, určité výhody pro různá použití. Šestý profil, nejtlustší a s největším prohnutím ze všech uvedených, je určen pro kachní plochy. Jeho prohnutí by mělo zaručovat větší míru podélné stability u kachen při létání při velkých úhlech náběhu, což znamená pomalu. „Kachny“ však mají jiné nectnosti, které mohou tuto jejich přednost zmenšit.
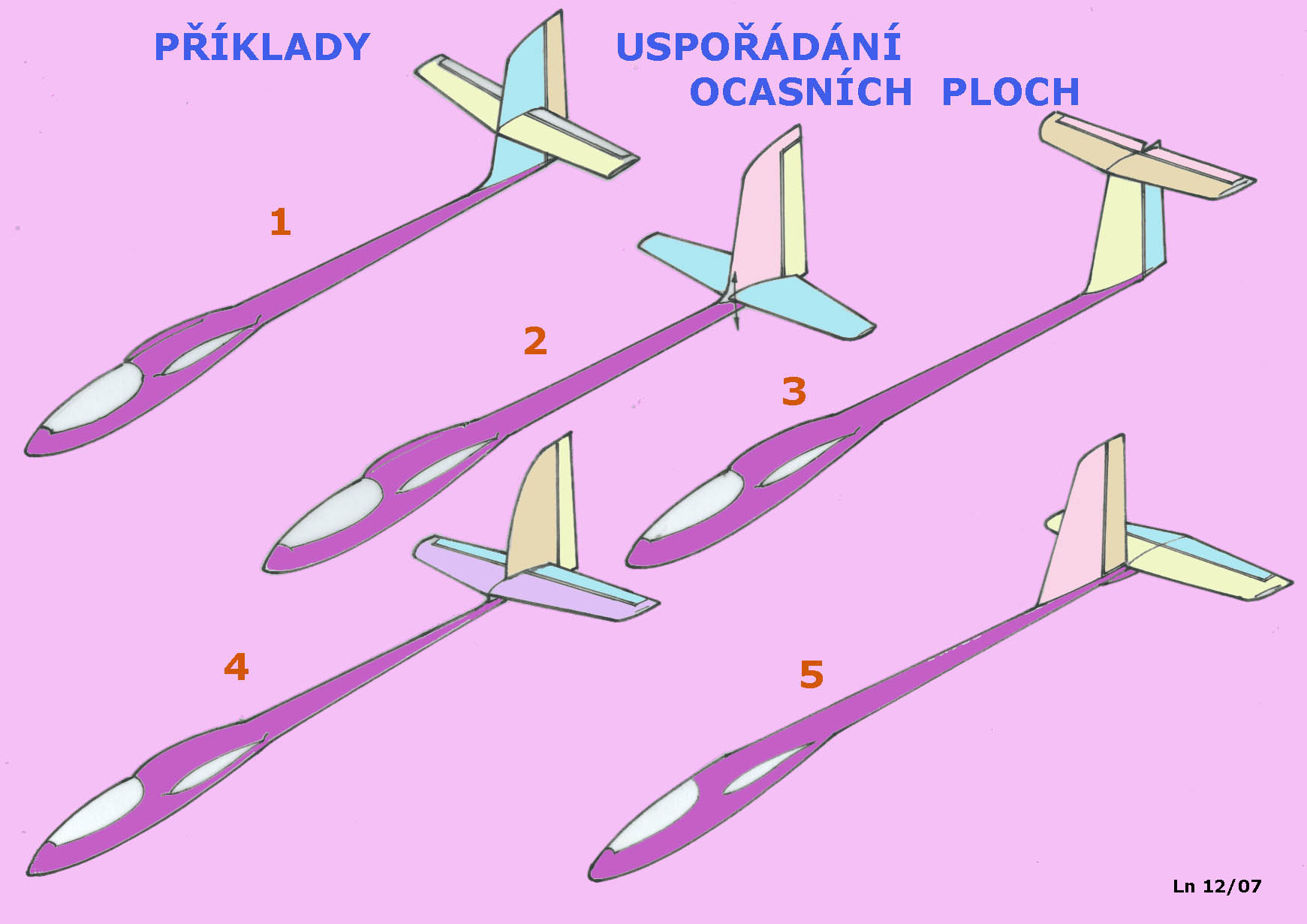
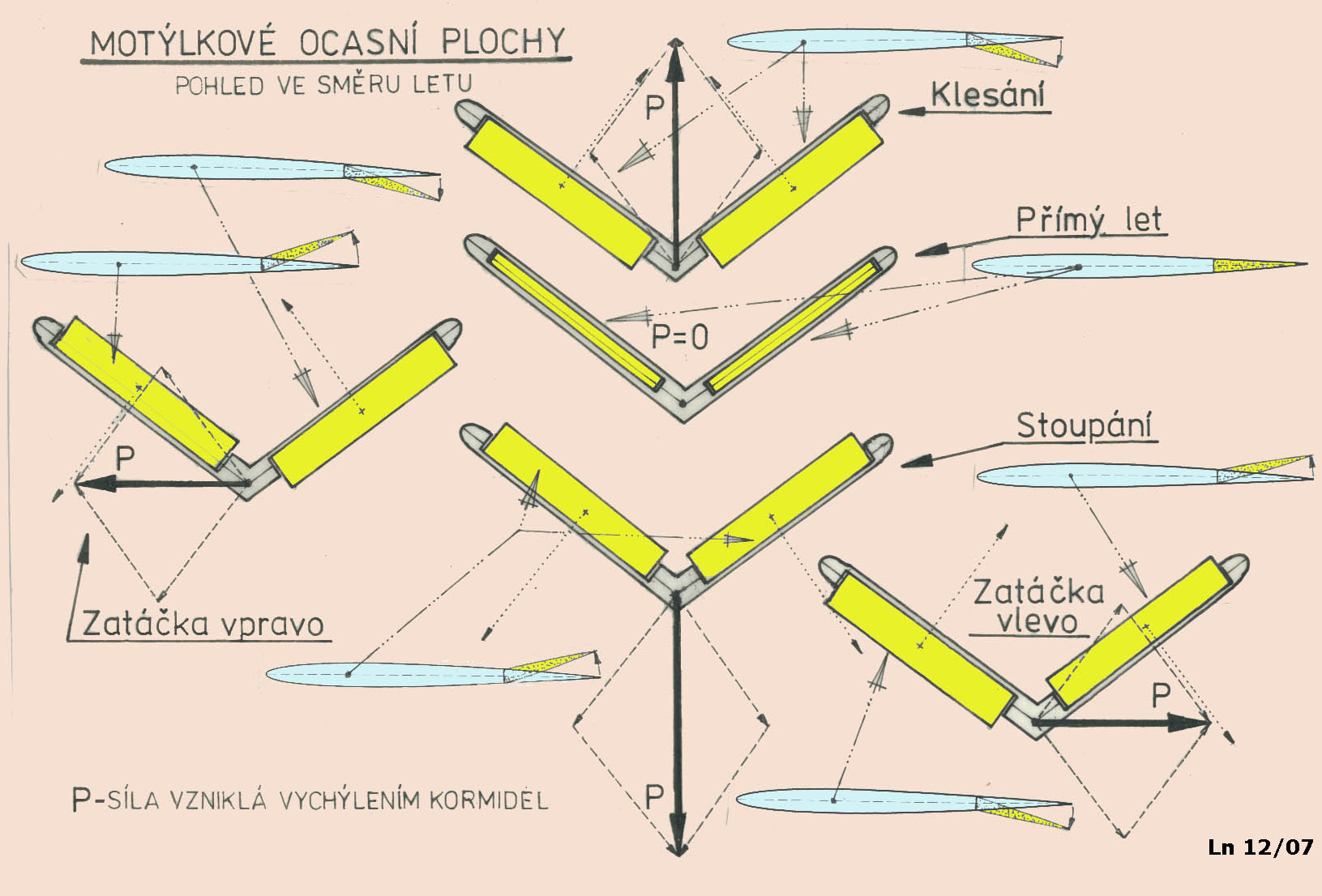
Na obr.č.7 je několik příkladů vzájemného uspořádání VOP a SOP na trupech větroňů. Každé z nich má svoje výhody i nevýhody. Z hlediska aerodynamické čistoty má být nejvýhodnější uspořádání vpravo nahoře. VOP je umístěna na SOP. Celkový výsledek je však hmotnější než u ostatních případů. Až dosud jsme se zajímali o ocasní plochy jejichž roviny jsou k sobě navzájem kolmé. Je tu však ještě jiné řešení, viz.obr.č.8, kdy spolu obě plochy svírají úhel poněkud větší než 90o. V podstatě se jedná o sdružení VOP i SOP v jeden celek se stejnou levou a pravou částí. Tomuto uspořádání se říká motýlkové ocasní plochy, které má mít menší odpor než ty příklady, které jsem uvedl dříve. Obě poloviny mohou mít pevné a pohyblivé části ploch (kormidla), to je případ v obrázku nebo mohou být bez nich(plovoucí).
Při pohledu ve směru letu(ze zadu) na motýlkové ocasní plochy může nastat 5 základních situací, jež mají vliv na změnu letu. Jsou-li obě kormidla vychýlena souhlasně dolů- obr.8 nahoře uprostřed, vzniká na ocasních plochách aerodynamická síla, jež je zde znázorněna vektorem P, působícím směrem vzhůru. Protože tato síla působí za těžištěm(u kachen je to obráceně), snaží se letoun přetlačit přídí dolů neboli přinutit ho klesat. Jestliže jsou obě kormidla v neutrálních polohách vhodných pro rovnovážný let- obr.8 uprostřed, pohybuje se letoun v přímém směru. Když vychýlíme obě kormidla souhlasně stejně nahoru, vznikne na ocasních plochách síla působící směrem dolů a nutí letoun zvedat příď a tedy stoupat(u kachen zase opačně-klesat)- obr.8 uprostřed dole. Když, ale vychýlíme obě kormidla nesouhlasně, jedno nahoru druhé dolů, vznikne síla P buď působící vlevo- obr. 8 uprostřed vlevo a pak letoun(model) zatáčí vpravo nebo vznikne síla P působící vpravo- obr.8 vpravo dole a následuje zatáčka vlevo. U kachních uspořádání je to zase opačně, protože ocasní plochy jsou před těžištěm. Jestliže vychylujeme obě kormidla současně, ať již souhlasně nebo opačně, ale pod různým úhlem, dojde ke kombinaci 4 z prve uvedených 5 základních pohybů. Takže je možné stoupat nebo klesat a při tom zatáčet. Tak to byly motýlkové ocasní plochy. Tvary ocasních ploch jsou podobné tvarům křídel. Na obr. č. 9 a 10 jsou některé jejich příklady. Ve skutečnosti jich je mnohem více. Nejsou zde uvedeny plovoucí plochy, protože je snadno získáme odstraníme-li pohyblivá kormidla a pak měníme úhly náběhu celé plochy.
U modelů letadel, kde ocasní plochy nejsou ovládány(tzv.volně létající modely) během letu, mají jejich kormidla, stavitelná pouze na zemi před letem, velmi malou plochu. Nebo jsou ocasní plochy bez kormidel úplně. A jak to může být u skutečných letadel?
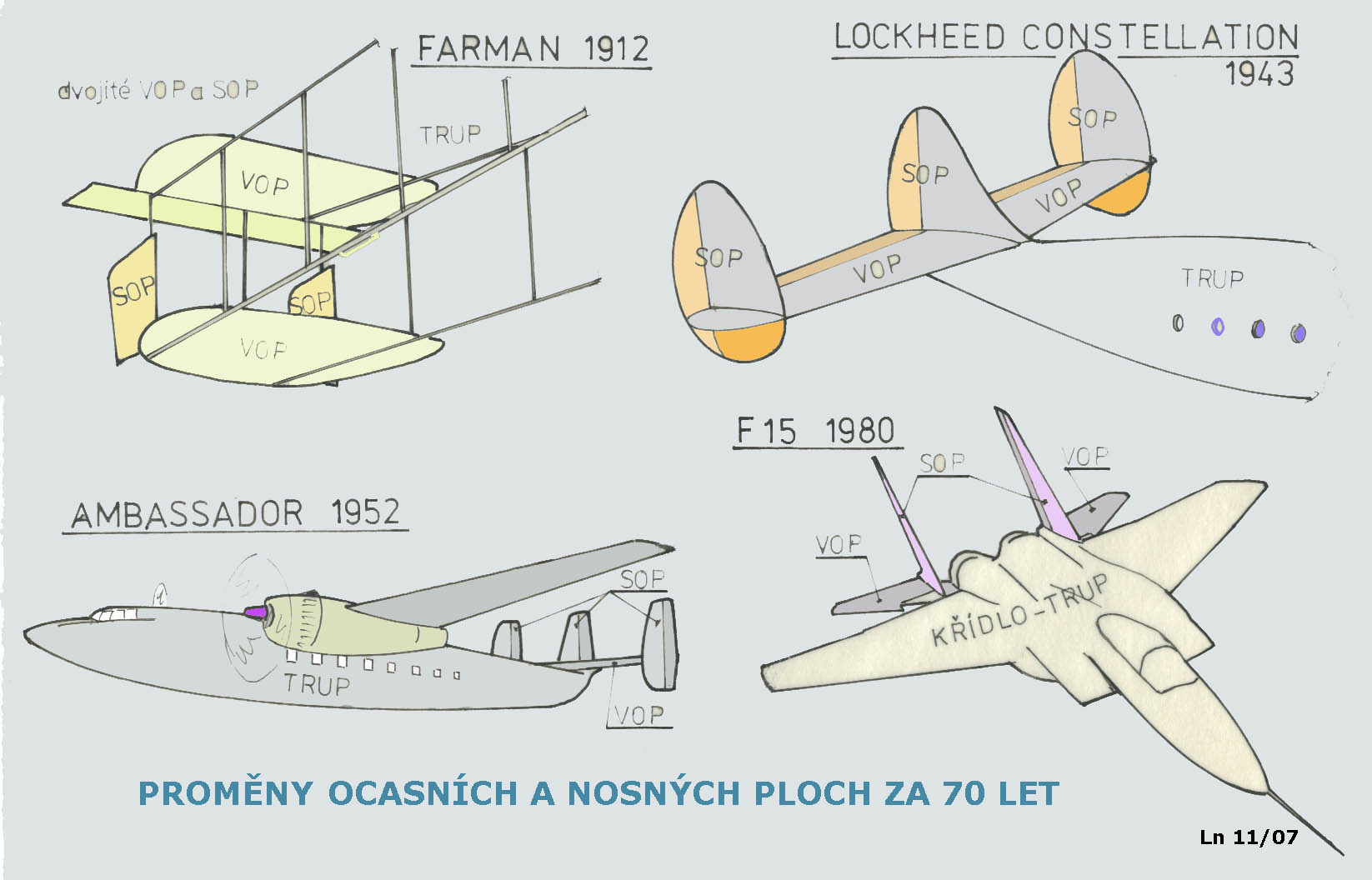
Na obr.č. 11 jsou ukázky ocasních ploch čtyř létajících strojů. Zdvojené VOP i SOP měl „Farman“ z roku 1912. Prohlédněte si jejich tvary a uspořádání na trubkovém trupu bez potahu. Trojité SOP měl slavný „Lockheed Constellation“ z roku 1943, který sloužil několik desítek let při zaoceánské přepravě cestujících. Elegantní „Ambasador“ měl rovněž trojité SOP. Legendární „F 15“ měl již jenom zdvojené SOP a plovoucí VOP.
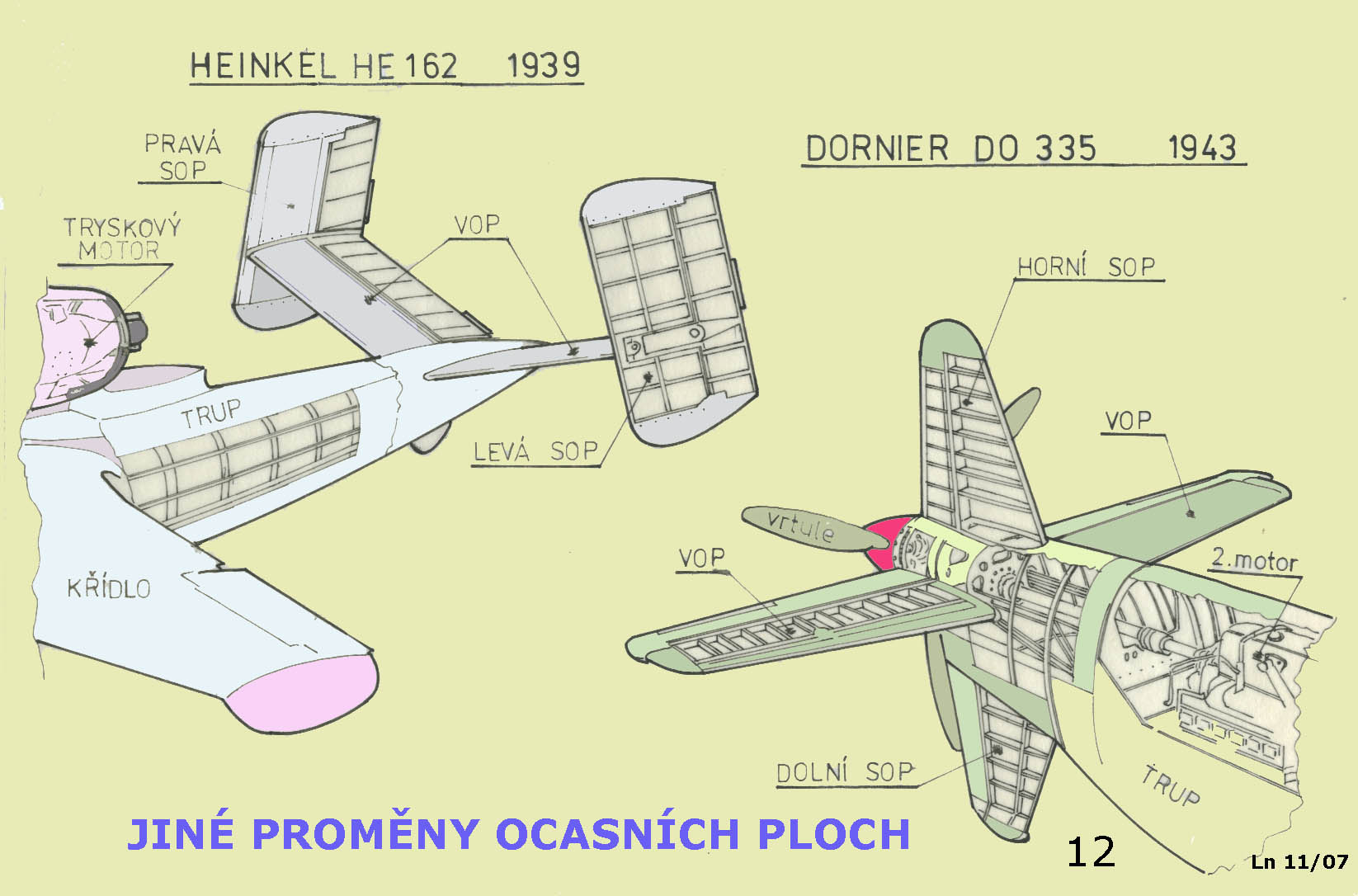
V obr.č.12 je vlevo uspořádání ocasních ploch prvního úspěšného letounu s tryskovým motorem na světě – „Heinkel He 162“ z roku 1939. Umístění motoru nahoře na trupu si vyžádalo uvolnění cesty pro tryskající horké spaliny a tím i zdvojení SOP. „Dornier Do 335“ z roku 1943 patřil mezi úspěšná řešení využívající dvou na sobě nezávislých tandemově uspořádaných vrtulových pohonných jednotek( Heinklovo obdobné řešení pro dva a dva tandemově uspořádané motory v křídle již tak úspěšné nebylo kvůli obtížím se sladěním otáček a výkonů). Jeho SOP vyčnívala vysoko nad i pod trup. Ocasní plochy byly umístěny těsně před zadní vrtulí. Do výzbroje Luftwaffe se dostal příliš pozdě i když měl prof. Dornier přiznaný patent tohoto řešení již na počátku třicátých let.
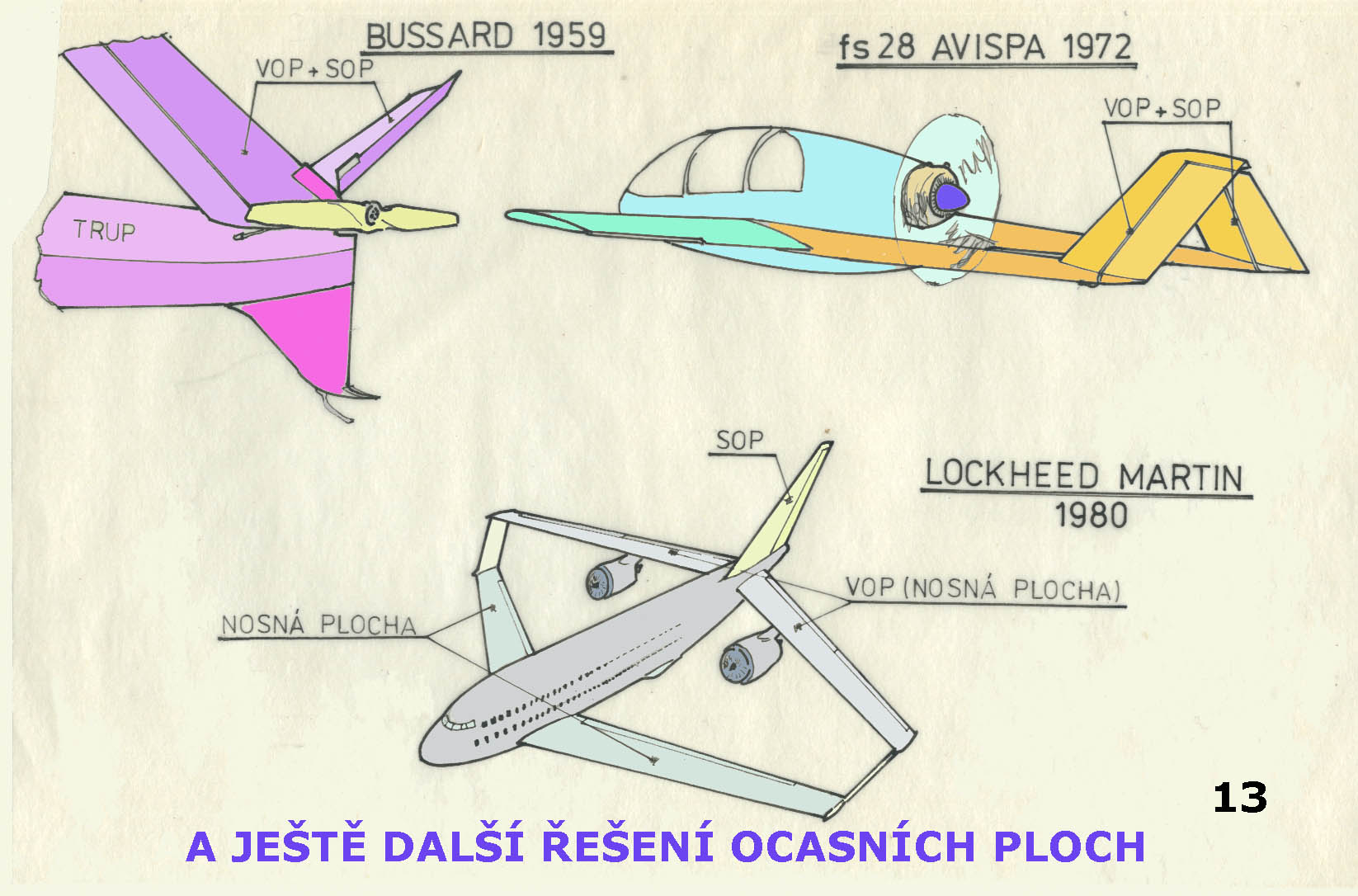
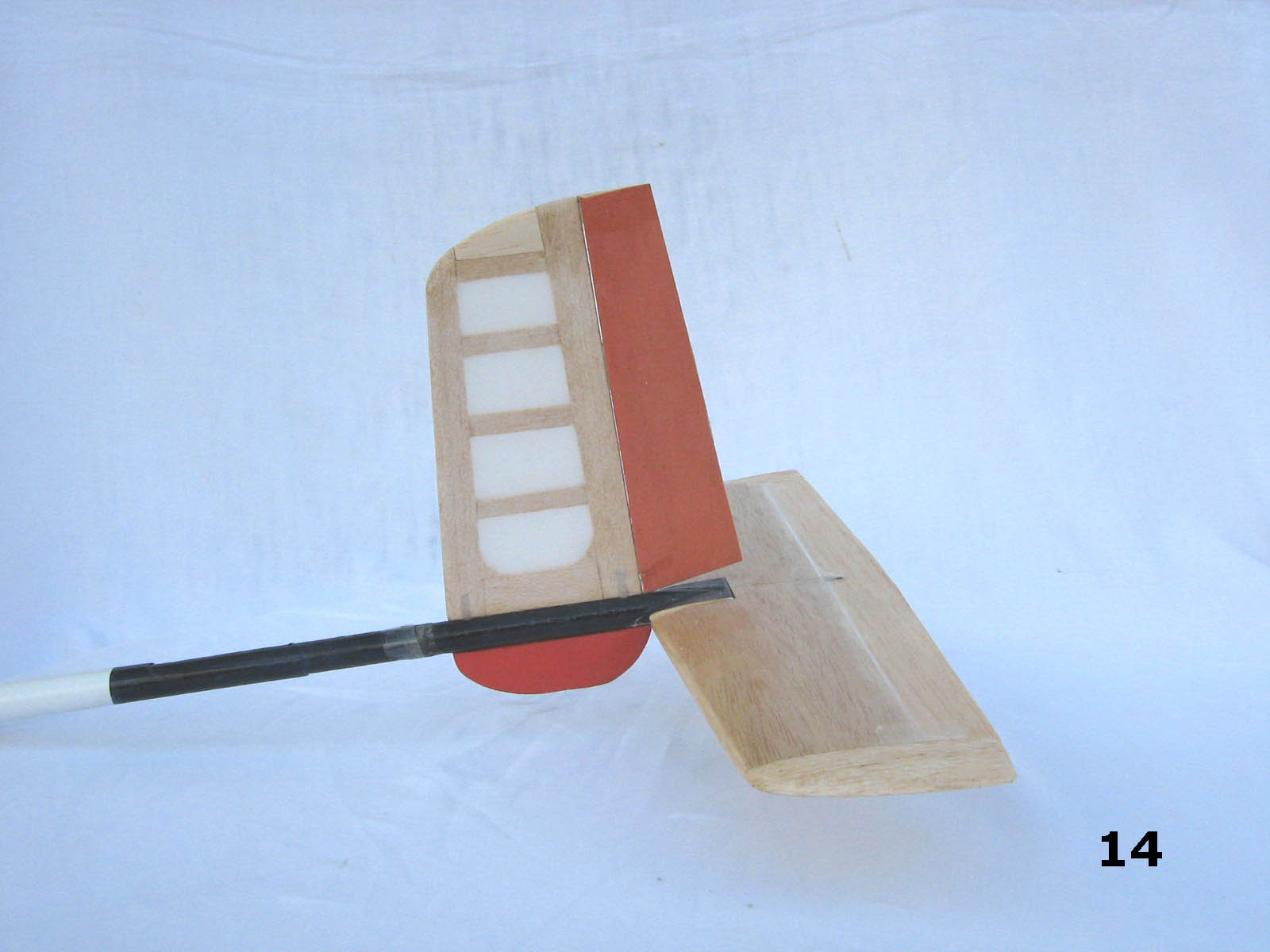
Na obr.č.13 je vlevo nahoře motýlkové uspořádání ocasních ploch u „Bussardu“ doplněné ještě spodní SOP. Vrtulová pohonná jednotka byla v tlačném uspořádání. Vpravo od něj je jiné sdružené uspořádání ocasních ploch do „střešovitého“ postavení „motýlích křídel“ u „fs 28 Avispa“ z roku 1972, ale s opačnými účinky při zatáčení než jsou na obr.č.8. A pak je tu návrh pro tandemové uspořádání nosných ploch u „Lockheed Martina“ z roku 1980 jež jsou, pro snížení nepříznivých účinků vyrovnávání tlaků na jejich okrajích, spojeny šikmými plochami. Nosné plochy mají proto positivní a negativní šípovitost. Část zadní nosné plochy může zřejmě zastávat i funkci VOP. Mohutná SOP je jen jediná. A teď několik příkladů z leteckého modelářství. Obr.č.14 ukazuje řešení kdy je celá VOP umístěna na trupu za SOP.
Na obr.č.15 je uvedeno obdobné řešení s uspořádáním VOP na konci trupu.
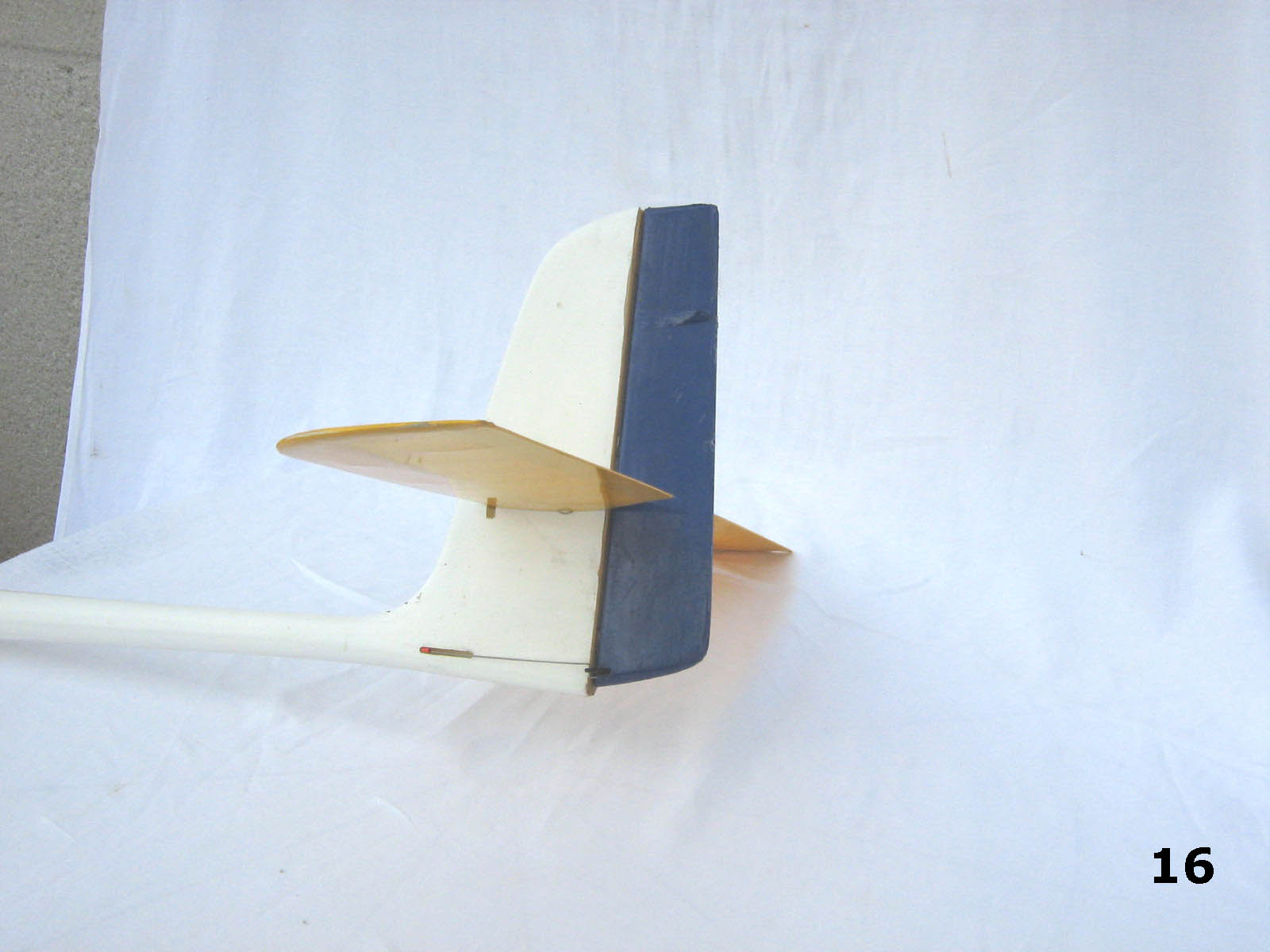
Obr.č.16 přináší příklad křížového uspořádání VOP a SOP, při čemž plovoucí VOP je otočně uložena v SOP.
Na obr.č.17 je varianta řešení z obr.14 a 15.
V obr.č.18. je opět příklad křížového uspořádání ocasních ploch, a obě plochy mají pevnou a pohyblivou část.
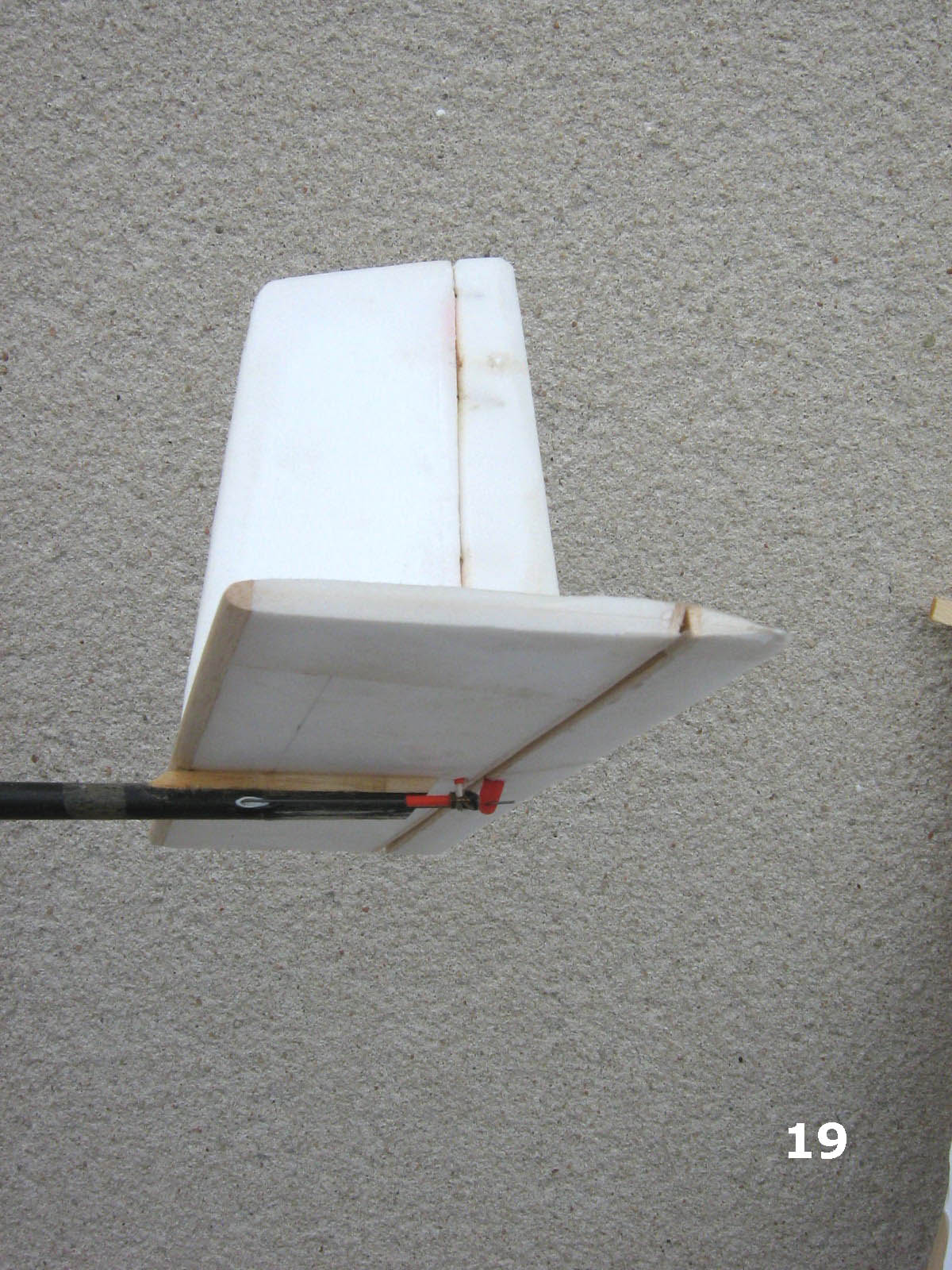
Obr.č.19 představuje příklad ocasních ploch, jež mají profily ve tvaru rovných desek.
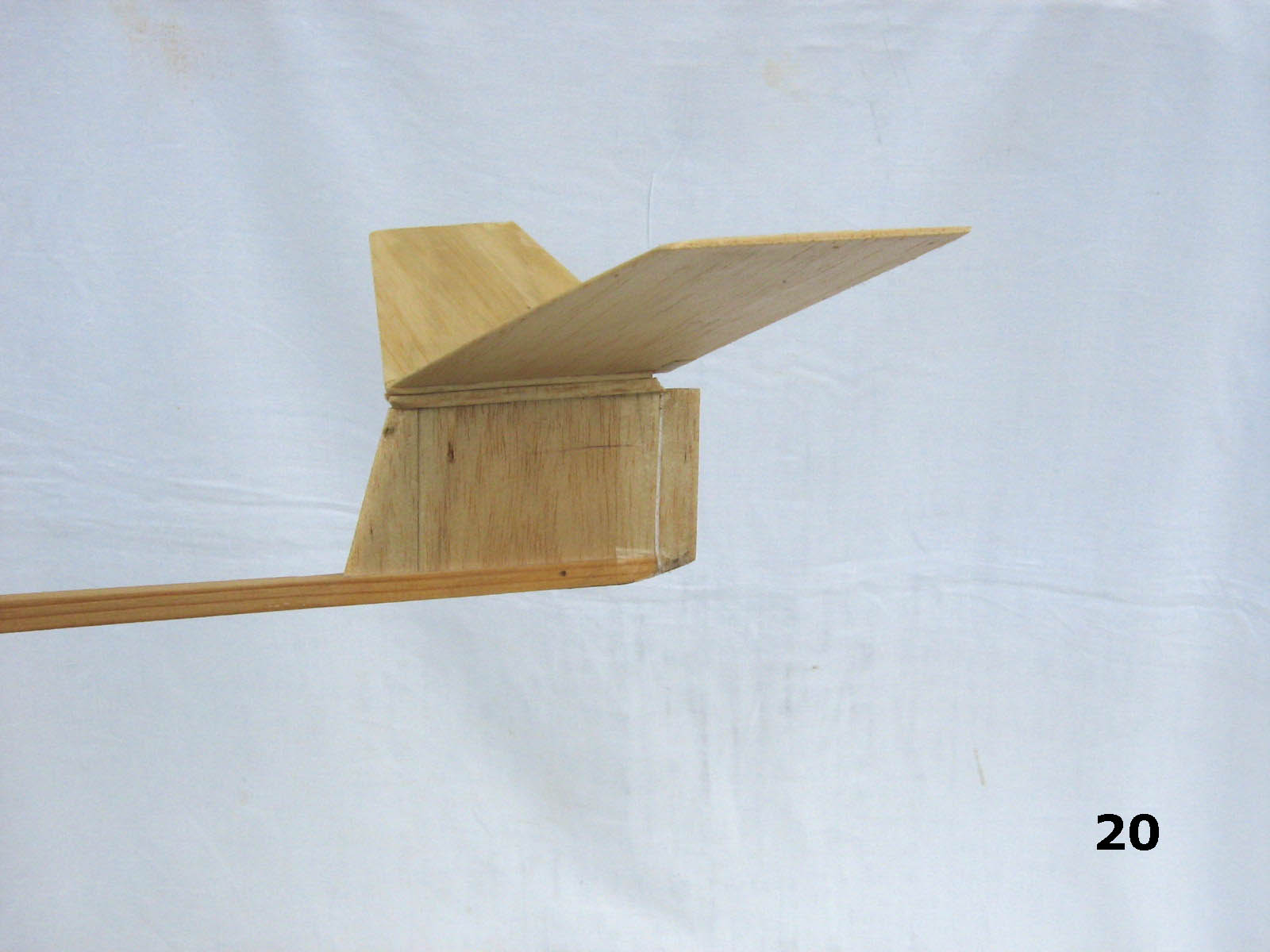
Na obr.č.20 je jedno z možných řešení pro volně létající modely, kdy ocasní plochy nejsou dálkově ovládány. VOP je tvarována do mírného vzepětí tvaru „V“.
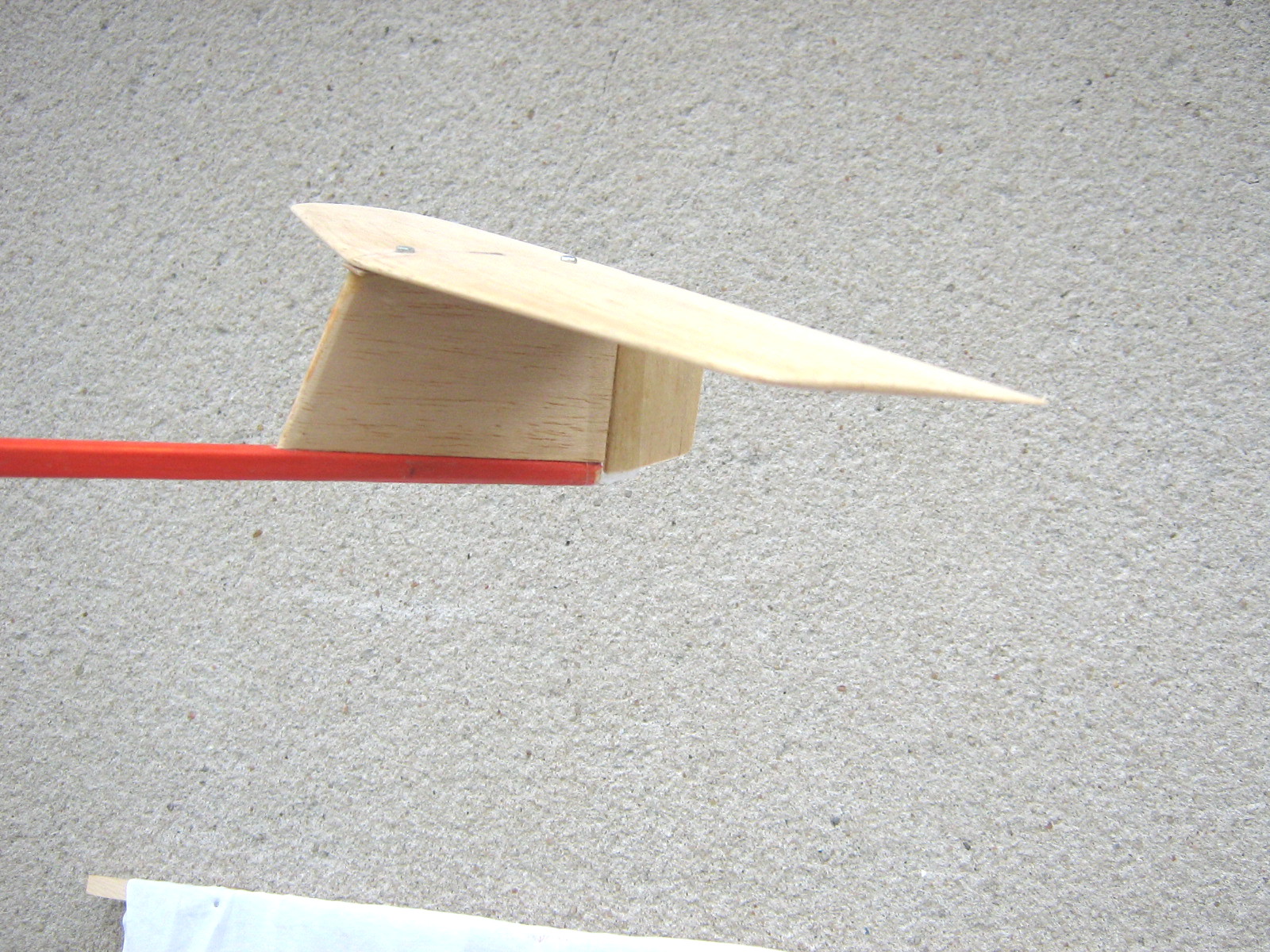
Z obr.č.21 je patrné, že se opět jedná o dálkově neovládané ocasní plochy, při čemž je jejich uspořádání ve tvaru „T“ ( VOP je nahoře na SOP).
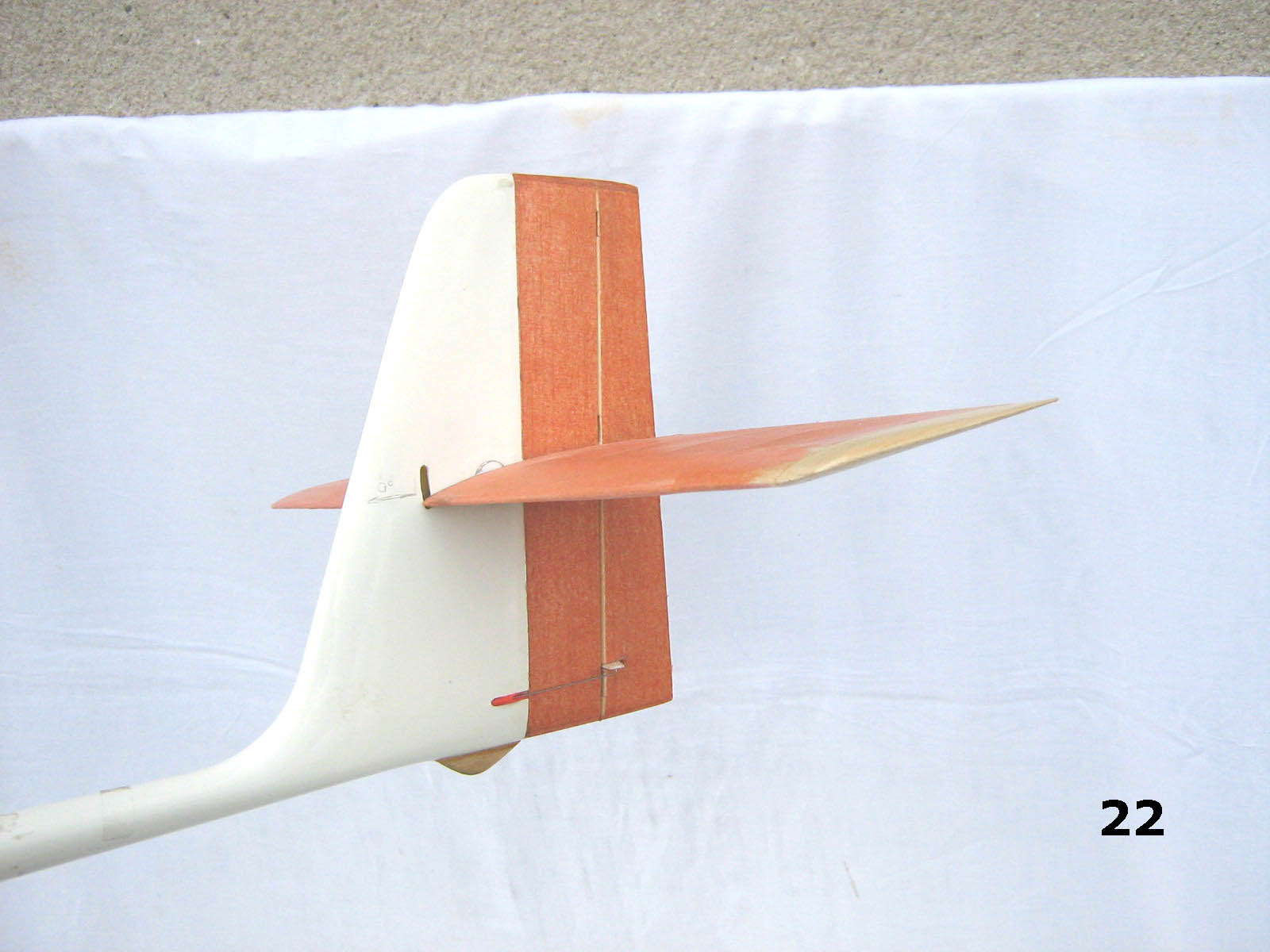
Na obr.č.22 je příklad obdobného uspořádání ocasních ploch jako v obr.16 a 18.
V obrázcích č.23 až 26 jsou uvedeny 4 příklady výchylek kormidel motýlkových ocasních ploch. Obr.č. 23 – kormidla jsou bez výchylek( v neutrálu) a model se pohybuje rovným letem. Obr.č.24 – obě kormidla jsou vychýlena dolů a model proto klesá. Obr.č.25 – obě kormidla jsou nesouhlasně vychýlena tak, že model zatáčí na pravou stranu. A na obr.č.26 jsou obě kormidla vychýlena vzhůru a model stoupá.
K čemu ale vůbec potřebujeme ocasní plochy? Vždyť jsou i letadla bezocasá-bez ocasních ploch, schopná letu. Uvedu alespoň dva důvody proč se bez nich obvykle neobejdeme i když ve zvláštních případech jsme schopni je nahradit částmi nosných ploch či jinak. Prvním argumentem proč mít nebo nemít ocasní plochy je to, že s nimi můžeme snadněji udržet přímý směr a měnit výšku letu a také velmi dobře zatáčet, ať již jenom s SOP nebo i s pomocí VOP. Přímý směr letu lze zajistit dostatečně velkými plochami za těžištěm letounu(modelu), které při působení vnějších sil( vítr, termika,..), jež se snaží stroj podle svislé osy natočit, naklopit a také naklonit a porušit tak předchozí rovnovážný let, pomohou obnovit původní polohu v co nejkratším čase. Pro udržení směru je využívána SOP s dostatečně velkou plochou umístěna ve vhodné vzdálenosti za nosnou plochou(těžištěm). Je možné s ní i zatáčet.
Zatáčet lze pomocí SOP jestliže:
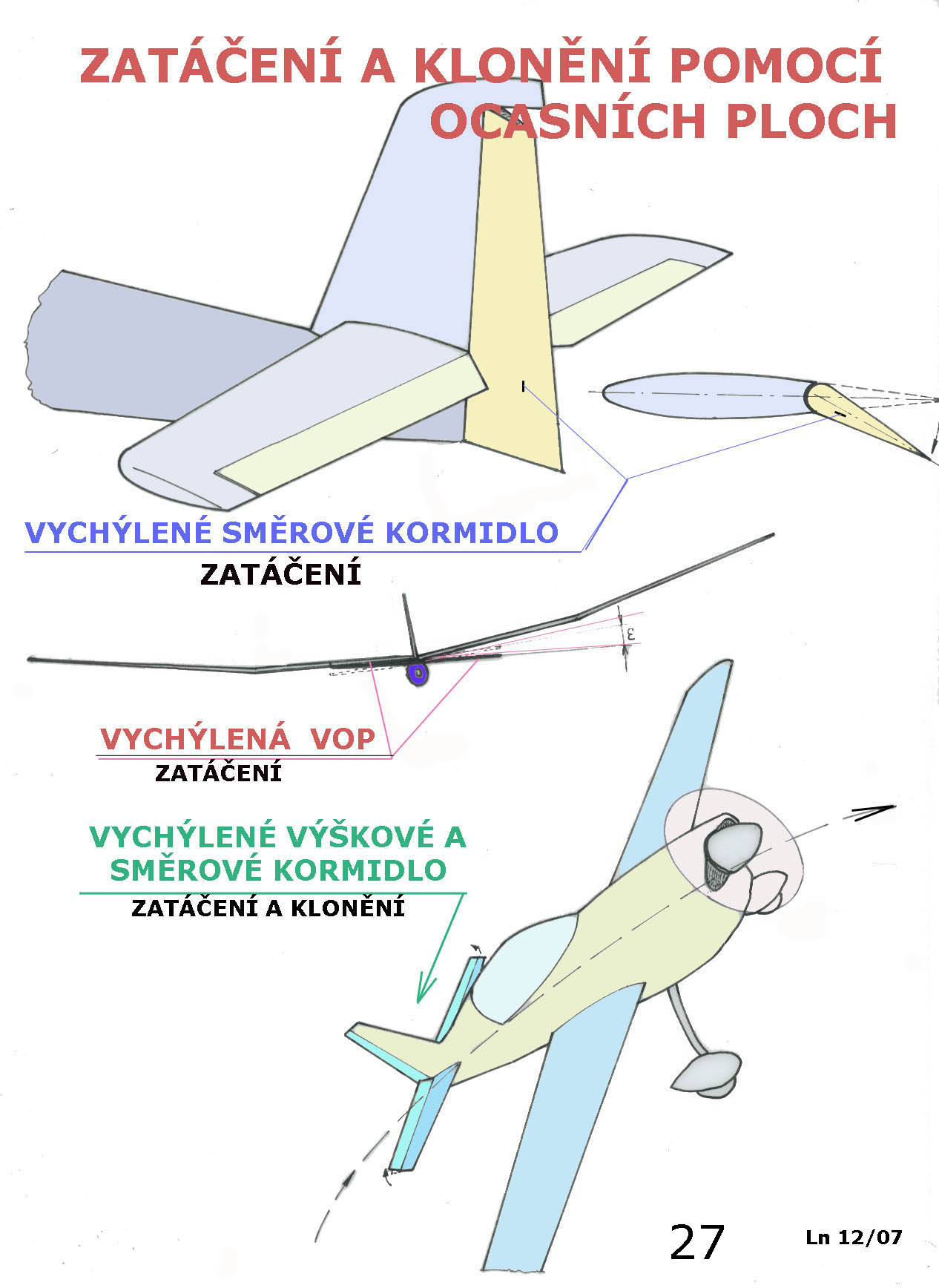
Měnit výšku a také rychlost letu je snadné pomocí ovládané VOP. Je třeba ji vybavit spolehlivými ovládacími mechanizmy a současně i jasně definovanou a po každé výchylce znovu nabytou původní neutrální polohou, ať již u plovoucí VOP nebo jen jejího výškového kormidla. V jiných případech, například při nožovém letu je stroj udržován v přímém letu pomocí VOP a křidélek a ve vodorovném nebo mírně klesajícím letu pomocí SOP a dostatečně mohutnou boční plochou trupu.. Účinného a spolehlivého zatáčení není vždy jednoduché dosáhnout pouze pomocí SOP a jejího směrového kormidla, protože je nutné sladit polohu těžiště se seřízením modelu a s velikostí výchylek směrového kormidla. Je to obtížné především u neřízených modelů letadel. U nich je snad i vhodnější využít přiměřeného náklonu VOP vůči křídlu než trvale vychýleného směrového kormidla, obr.č.27 nahoře. Druhým argumentem, je možnost pomocí VOP vyrovnávat působící síly a momenty v podélném směru na letící letoun a zajistit tak potřebné vlastnosti(podélnou stabilitu), bez nichž by jeho sebelepší výkony nebyly plně využity. Její větší důležitost ve srovnání s SOP na letové vlastnosti a také výkony je dána tím, že zatáčení lze zajistit také pouze nesouhlasným vychýlením křidélek či jiných částí nosné plochy, což je například u mnoha modelů letadel využíváno. Takže SOP s pohyblivým směrovým kormidlem k zatáčení není vždy nutně třeba. Nutno podotknout, že to ale není právě nejefektivnější způsob jak zatáčet.
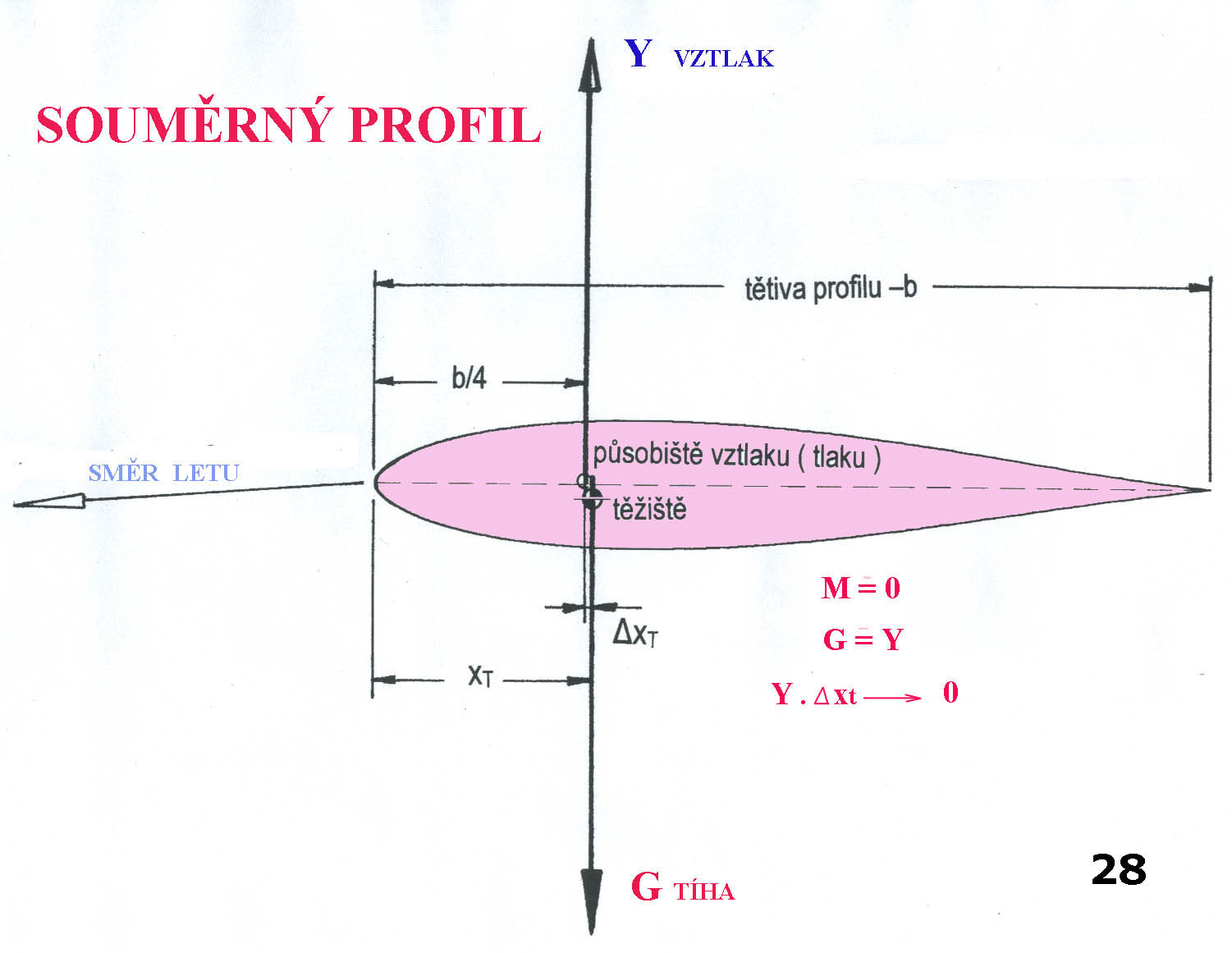
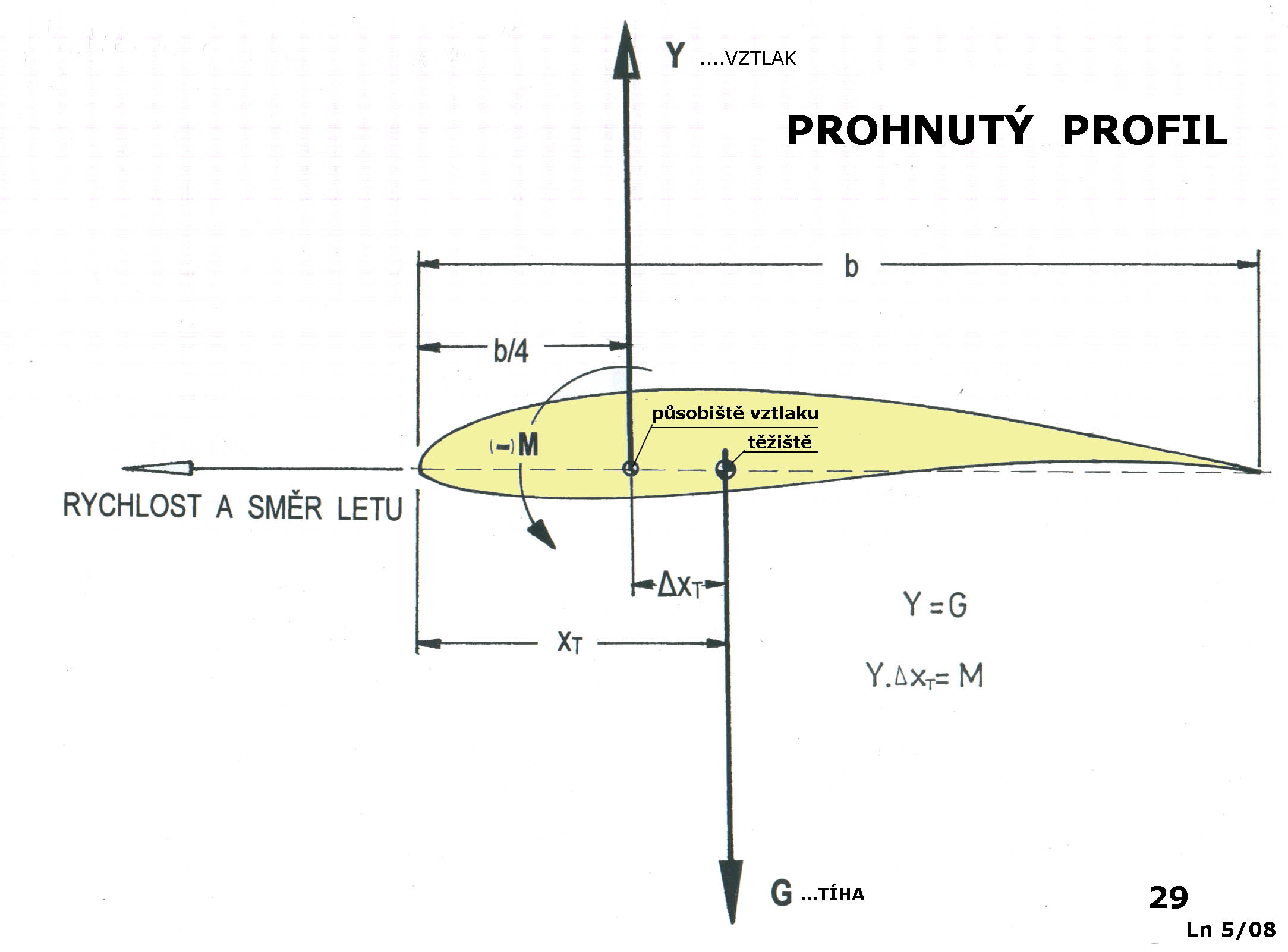
Na obr.č.28 je schéma kdy na křídlo se souměrným profilem působí vztlak a tíha letounu. Protože se jedná o ustálený let jsou obě síly stejně veliké opačného smyslu Y=G. Odpor teď ponecháme stranou. Jedná se nám teď o zjednodušený způsob posouzení rovnováhy sil ve svislém směru. Působiště vztlaku se nachází u profilů v rozmezí cca 23 až 28 % jejich hloubky. Za jejich průměrnou hodnotu je považována čtvrtinová hloubka profilu, která je poměrně důležitým pojmem při aerodynamických rozborech(jak jsme již uvedli v předchozím čísle AL). Jestliže bychom dokázali, aby působiště vztlaku a těžiště se nacházely na jedné svislici, pak bychom VOP nepotřebovali. Ale jen potud, pokud by nedošlo k porušení této rovnováhy působením vnějších sil, jak jsme již naznačili prve. A let by musel být ustálený, tj. ani zpomalený ani zrychlený.Takováto situace se vyskytuje ve skutečnosti tak zřídka, že na ni nelze spoléhat ani u souměrných profilů. Lze si sice vypomoci zkroucením konců křídla do mírných záporných úhlů náběhu a upravením půdorysu křídla do šípu a dát tak vzniknout bezocasému létajícímu stroji zvanému samokřídlo. Když potom ještě učiníme některé části jeho nosné plochy pohyblivými můžeme docela dobře ovládat změny výšky letu také. Problematiku tzv. bezocasých „prken“ jsme nyní odbyli velmi stručně. Ale jen proto, že by její posouzení zabralo dost místa a času, takže bychom mohli snadno sejít s cesty popisující ocasní plochy, obecněji. Co se ale stane jestliže v křídle bude prohnutý profil, jak vyplývá z obr.č.29?
Zde vedle vztlaku a tíhy působí ještě tzv. klopný moment, který se snaží v našem případě stočit let ve směru šipky,tj. „nosem dolů“. Protože to není pro nás vhodný způsob létaní-pouze prudce směrem k Zemi, musíme tomu nějak zabránit. Teoretickým řešením je posunout těžiště za působiště vztlaku( u samokřídel se symetrickými nebo dvojitě prohnutými profily je tomu naopak) a nalézt takovou jeho polohu, aby dvojice sil Y a G vyrovnala účinky momentu M. Protože však ve skutečnosti prakticky neexistují podmínky pro dosažení ustáleného letu, jestliže působí vnější vlivy v ovzduší(vítr, termika,..) a když se velikosti vztlaku a momentu navíc mění zásadně se změnou úhlů náběhu a rychlostí letu, musíme se tomu, chtě nechtě, nějak přizpůsobit. Výsledkem je pak nutnost použít VOP vhodné velikosti, ve vhodné vzdálenosti za nosnou plochou a pod vhodným úhlem vůči ní. Určitý vliv má zde i tvar použitého profilu, ač převážně jsou používány profily souměrné. Takže bez VOP to zřejmě nepůjde, ať je plovoucí či s výškovým kormidlem. Bez SOP to také není dost dobře možné, i když nemusí být ani plovoucí ani mít ovládané směrové kormidlo. Bez ocasních ploch je tedy velmi obtížné se u letounů s pevnými křídly obejít. Jak by asi měly vypadat jejich velikosti, když jsem již několik jejich tvarů naznačil dříve. Je účelné je poměřovat s velikostí nosných ploch, ať již jsou uspořádány před nimi, za nimi nebo využívají jejich částí pro ovládání změn směru a výšky letu. Velmi důležitý parametr je v tomto případě poměr velikosti ocasní plochy ku velikosti nosné plochy. Pak je zde u VOP i SOP důležitá jejich vzdálenost od těžiště letounu(modelu). Tato hodnota se u VOP poměřuje se střední aerodynamickou tětivou nosné plochy a u SOP s jejím rozpětím. Když těchto pět veličin upravíme do dvou rovnic získáme údaj zvaný mohutnost ocasní plochy. Jejich veliké hodnoty sice zajistí velmi dobrou a obvykle i rychlou manévrovatelnost při změnách směru a výšky letu, ale přinášejí s sebou zbytečně velký odpor, který znehodnocuje výkony stroje. Na straně druhé zase její nízká hodnota může velmi znesnadnit pohyby letounu v ovzduší. Je na každém navrhovateli létajícího stroje jaké velikosti zvolí, pokud se nespokojí s již daným stavem ze stavebnice nebo plánu.
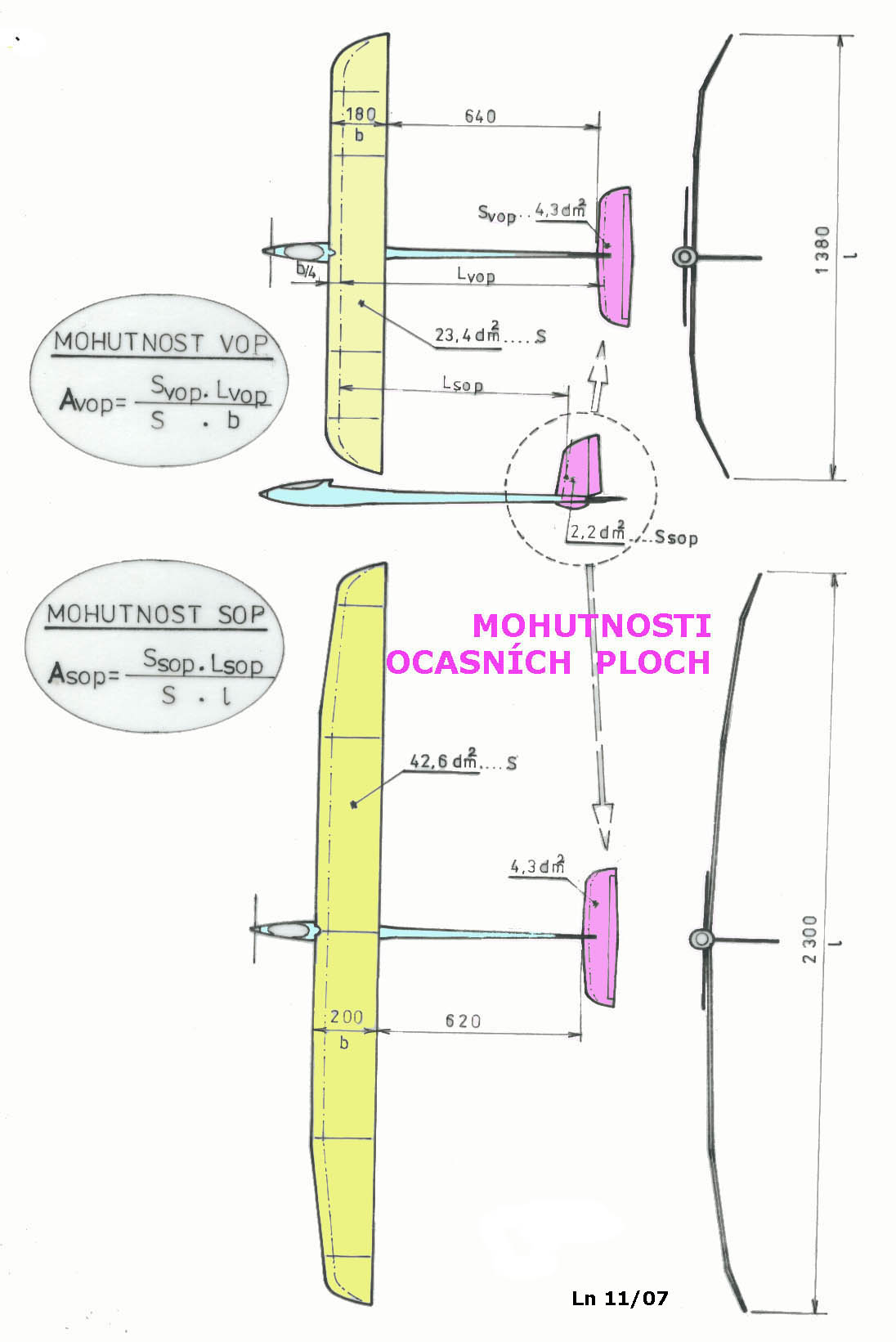
Uvedu dva extrémní příklady modelů kluzáků poháněných elektromotorem, u nichž byly ovládány pouze ocasní plochy. První z nich je na obr. 30 a 32 nahoře. S ním jsem létal jednoho zářijového dne roku 2007 dopoledne. Byl velmi dobře ovladatelný a nezvykle živě a bleskově reagoval na výchylky kormidel. Velikost výchylek jsem musel obezřetně nastavovat, aby při motorovém-dost rychlém letu, nedošlo k destrukci křídla. Velikost VOP činila 18,4% a velikost SOP 9,5% z velikosti nosné plochy o hodnotě 23,4dm2. Mohutnost VOP byla cca 0,754 a mohutnost SOP cca 0,051.
Druhý z nich je na obr.č.31 a 32 dole. S ním jsem létal téhož odpoledne. Jediná, zato veliká, změna spočívala ve výměně nosné plochy. Ta byla nyní 42,6dm2. Ostatní díly kluzáku zůstaly zachovány. Profily obou nosných ploch si byly velmi podobné a Reynoldsova čísla se lišila jen málo(mohlo to mít samozřejmě nějaký vliv). Velikost VOP byla stejná jako ráno tj. 4,3dm2, velikost SOP byla také 2,2dm2, rovná dopolednímu údaji. Mohutnost VOP nyní klesla na 0,436 a mohutnost SOP na 0,017. Kluzák byl i nyní ovladatelný pomocí kormidel ocasních ploch, ale reagoval pomaleji a méně ochotně. V poryvech větru se stával chvílemi i málo poslušným. To není dobré pro žádný létající stroj. Posunul jsem těžiště poněkud kupředu a o několik procent zvětšil plochu obou kormidel. Letové vlastnosti se poněkud zlepšily. Byl to však diametrální rozdíl oproti rannímu létání s jinými mohutnostmi ocasních ploch.
Co z toho lze odvodit pro praktické použití? Učiníme-li předpoklad, že vzdálenosti mezi náběžnou hranou nosné plochy a náběžnými hranami ocasních ploch se budou pohybovat v rozmezí 3,7 až 4,2 střední hloubky nosné plochy, pak by mohutnosti ocasních ploch mohly být pro běžné použití na modelech letadel:
U kluzáků doporučuji volit hodnoty mohutností menší. U modelů motorových, určených i pro akrobacii, hodnoty zase větší. Uvedené doporučené limitní hodnoty mohutností mohou být podle libosti konstruktérů a stavitelů létajících strojů překročeny či „podkročeny“. Tak například pro kategorii F1E (kluzáky ovládané magnetem) bývá tato hodnota větší než jedna. Obdobně se mohou tyto hodnoty více blížit jedné i u některých skutečných letadel. Jednoduché matematické vztahy pro určení mohutností obou ocasních ploch jsou v obr.č.28. Jak to může být s velikostmi kormidel obou ocasních ploch? Ty je zapotřebí sladit s velikostmi výchylek. Ten kdo si bude libovat v náhlých změnách směru a výšky letu použije větší plochy kormidel a možná i hodnoty mohutností OP za prve uvedenou a doporučenou hranicí. Větší plochou zde mám na mysli jestliže rozpětí(délka) kormidla bude po celém rozpětí OP a jeho střední hloubka bude větší než asi 40% střední hloubky celé OP. To by mohlo být občas přijatelné u SOP, ale s výchylkami do cca 25o. Jinak by mělo stačit, aby střední hloubka směrového kormidla nepřesáhla 33% střední hloubky SOP. U VOP by nemusela být střední hloubka výškového kormidla větší než asi 22 ÷ 30% střední hloubky VOP. To všechno za předpokladu, že těžiště létajícího stroje neleží ve větší vzdálenosti od náběžné hrany střední aerodynamické tětivy nosné plochy jednoplošníku než cca 34%. Jestliže je těžiště posunuto více dozadu, což by mohlo být podpořeno větší mohutností VOP, pak je velmi účelné výchylky obou kormidel zmenšit. Obvykle jsou voleny výchylky kormidel ocasních ploch v těchto rozmezích:
Nezapomínejte, že ocasní plochy vyvozují samy o sobě přídavný odpor, který narůstá dramaticky s velkými výchylkami kormidel. Povšimněte si toho například u halových akrobatických modelů, parkflyerů a podobně, kde se trhavý neustálený let podobný motýlímu, a vedený často s vybočením, jaksi vyžaduje. Obdobně je možné se s tím setkat i u skutečných akrobatických letadel. Tím se však znehodnocují výkony létajícího stroje a to přece nechceme. Pravidlům některých soutěžních klání, „přemotorovaným“ modelům a především jejich provozovatelům to však příliš nevadí. Tento článek se zabýval stručně pouze vlivem ocasních ploch na letové vlastnosti létajících strojů. Nebyly zde zohledněny účinky křidélek, aerodynamických brzd, spoilerů, slotů apod. Rovněž zde nebyly zvlášť připomínány nepříznivé účinky provázející málo vyvinutá proudění, která jsou pro mnoho modelů typická. Jakkoliv je tento příspěvek zaměřen hodně do leteckého modelářství, mohou si z něj vzít ponaučení i provozovatelé a stavitelé skutečných menších letadel, pokud o to budou stát. Protože mnohé zákonitosti a funkce jednotlivých částí letadel jsou společné pro skutečná letadla i jejich modely.
Jaroslav Lněnička
31.1. až 5.5. 2008
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| e-magazín Akademie letectví :: © Jan Janovec, © Jaroslav Lněnička :: akademie@airspace.cz | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||